


Two-level Game Based Multi-arm On-orbit Servicing Spacecraft Path Planning
-
摘要: 针对在轨服务多臂航天器系统高精度的位姿协同要求及其运动过程中的避障约束,提出一种基于机械臂末端(腕关节)和肘关节的双层博弈多臂路径规划方法。研究建立了多臂运动学模型,在博弈论基础上建立多臂的博弈模型;给出了双层博弈的基本算法流程及其纳什均衡解的求解策略;以动目标多臂围捕为场景进行仿真分析,验证所提出算法末端精确跟踪抓取和肘部避障能力的有效性和实用性。所得结果可为多臂在轨服务航天器的智能化路径规划与控制提供新的解决方案。Abstract: A two-level game strategy is proposed for the on-orbit servicing spacecraft multi-arm path planning and collision avoidance. The first-level game, i.e., end-effector game, is utilized to guarantee the capturing path planning of multi-manipulator while the second-level game, i.e., elbow joint game, is used to avoid self-collision during motion and govern a balanced distribution between multiple arms. The kinematics for the multi-manipulator is established and the game model of multi-manipulator is formulated on the basis of the game theory. Then the basic process of the proposed two-level game is given as well as the algorithm for obtaining the Nash equilibrium to solve the proposed two-level game strategy. Simultaneously, some simulation analyses are carried out under the scenario of multi-arm spacecraft round-up a moving target case to demonstrate the effectiveness and practicality of the proposed method. Simulation results verify the performance of the proposed two-level game in high precision end-effector planning and elbow joint collision avoidance in the capture process. The proposed method provides a new solution for intelligent path planning and control deployed multi-arm on-orbit servicing spacecraft.
-
Key words:
- Multi-arm spacecraft /
- Path planning /
- Two-level game /
- Autonomous collision avoidance
-

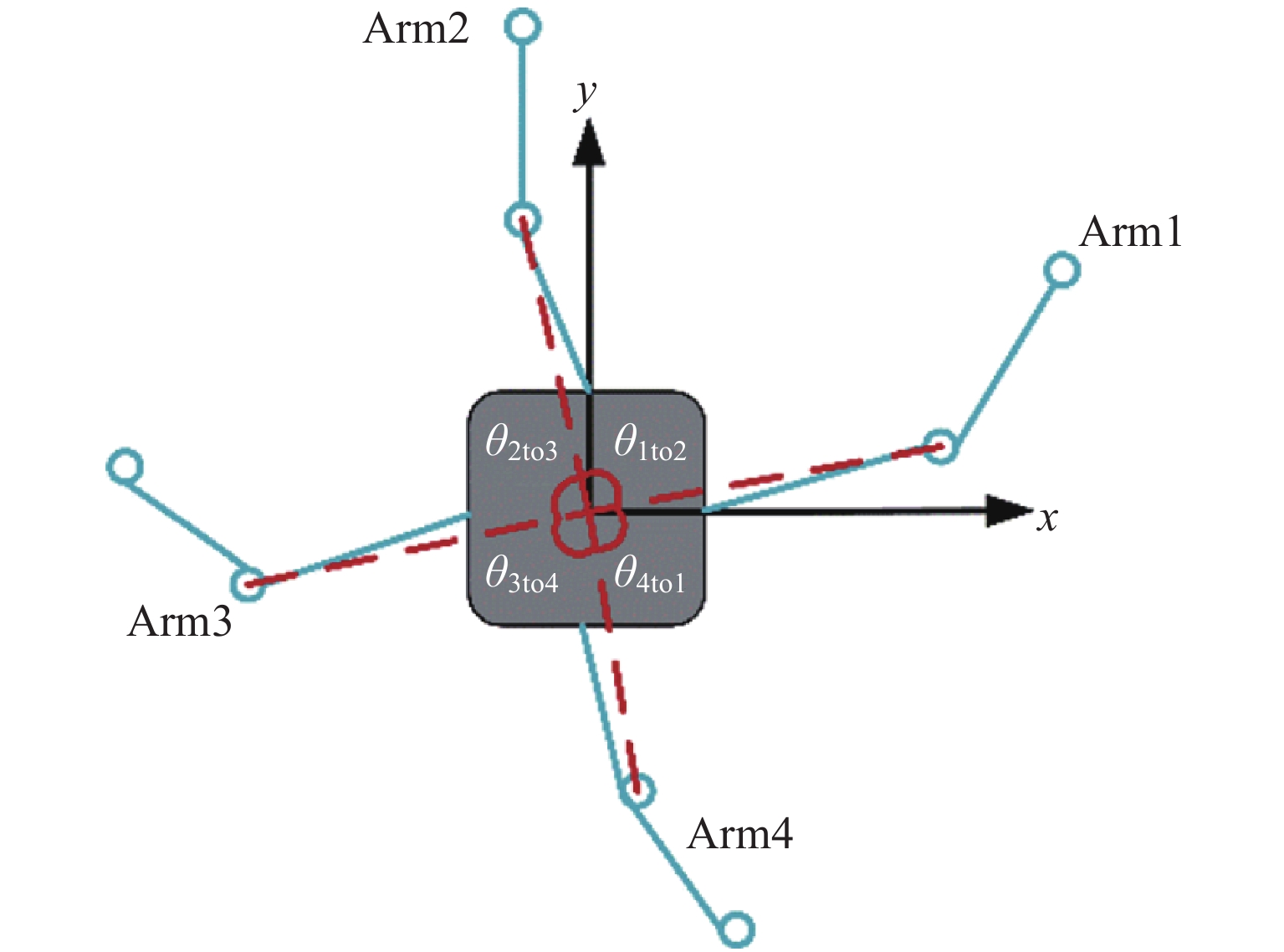
图 1 多臂航天器整体构型及坐标系定义
Figure 1. Configuration of the multi-arm spacecraft and the definition of the coordinates

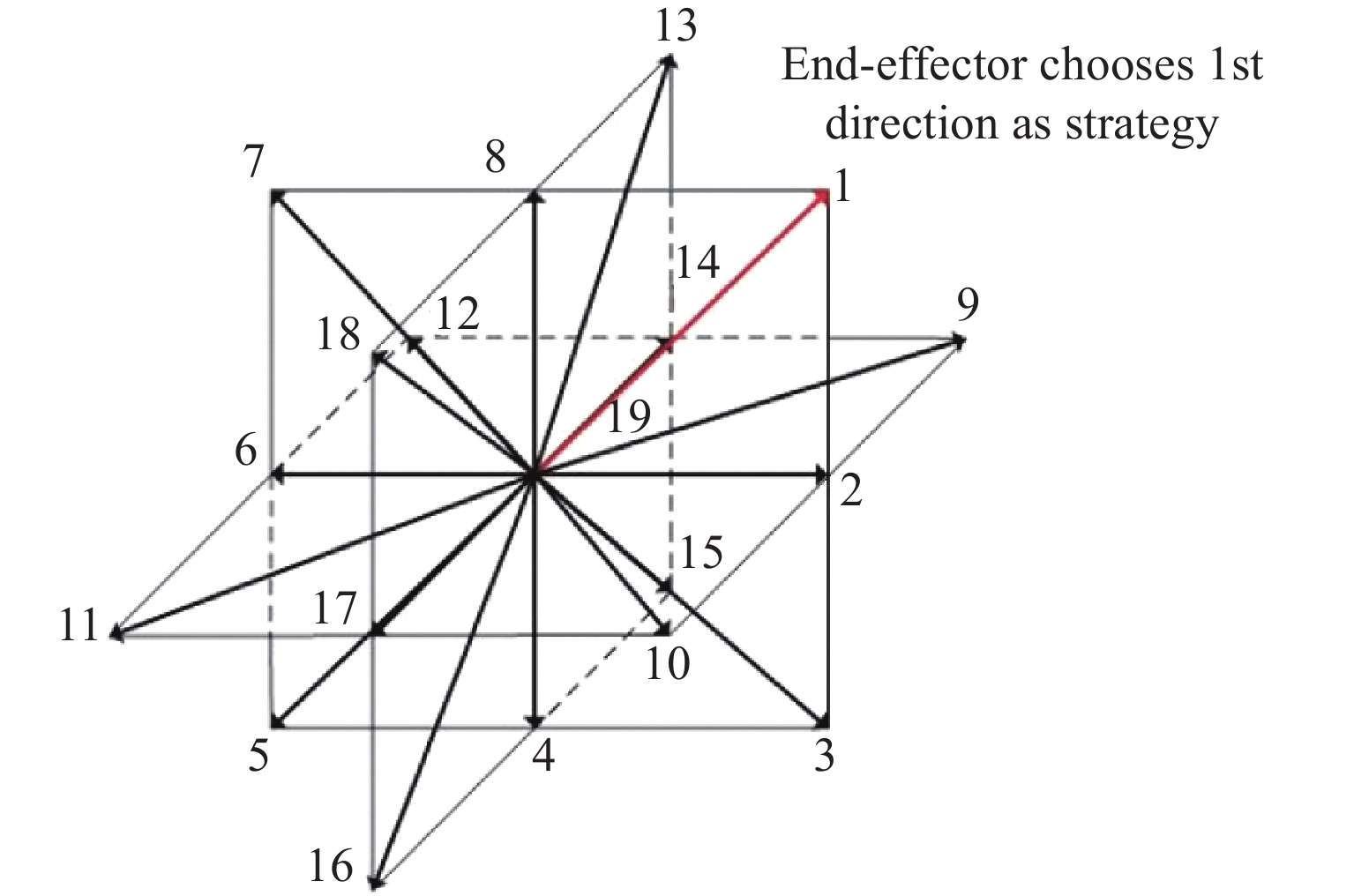
图 3 由19个可能动作构成的机械臂追捕博弈策略集
Figure 3. Strategy set of the manipulator tracking game formed by the 19 potential actions

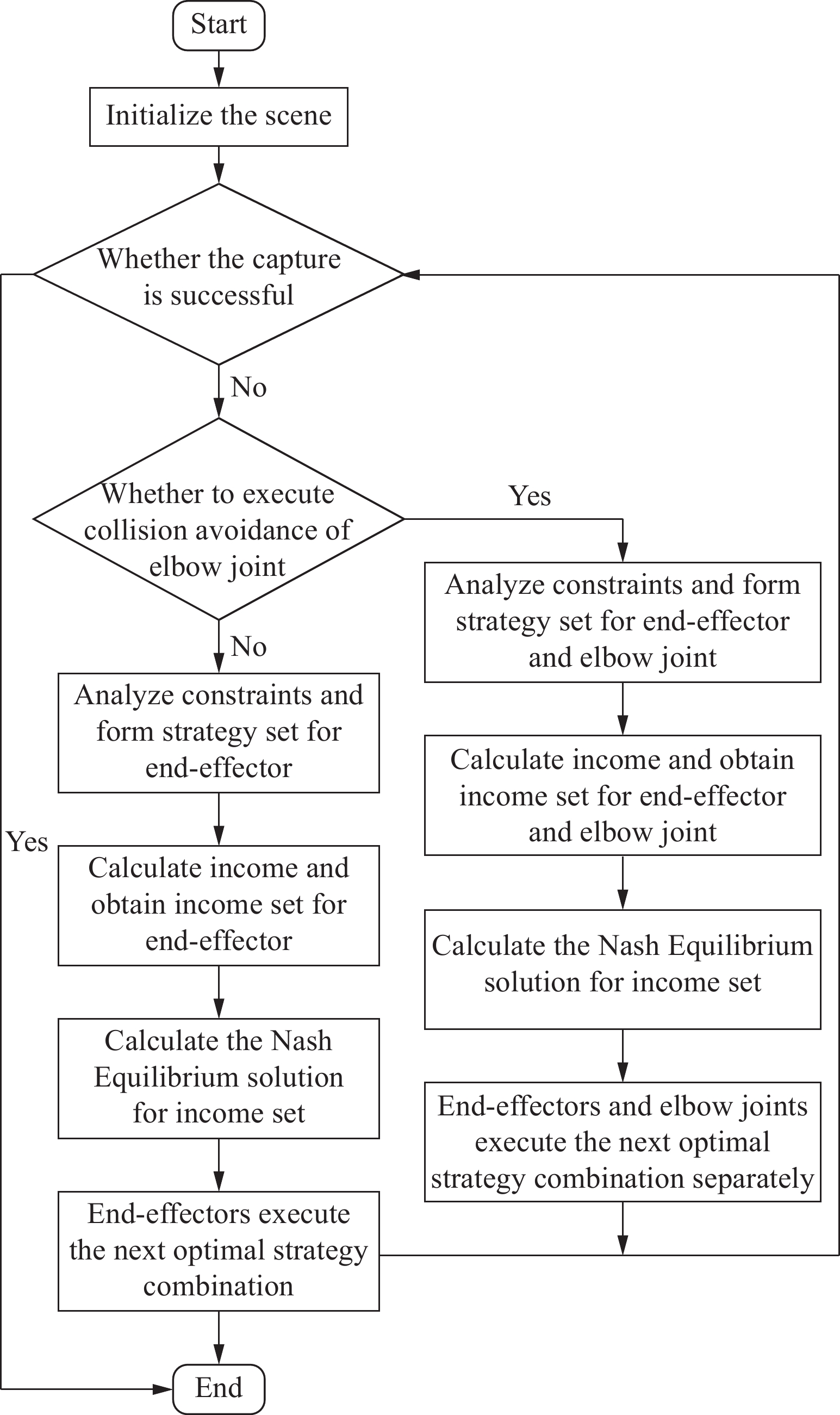
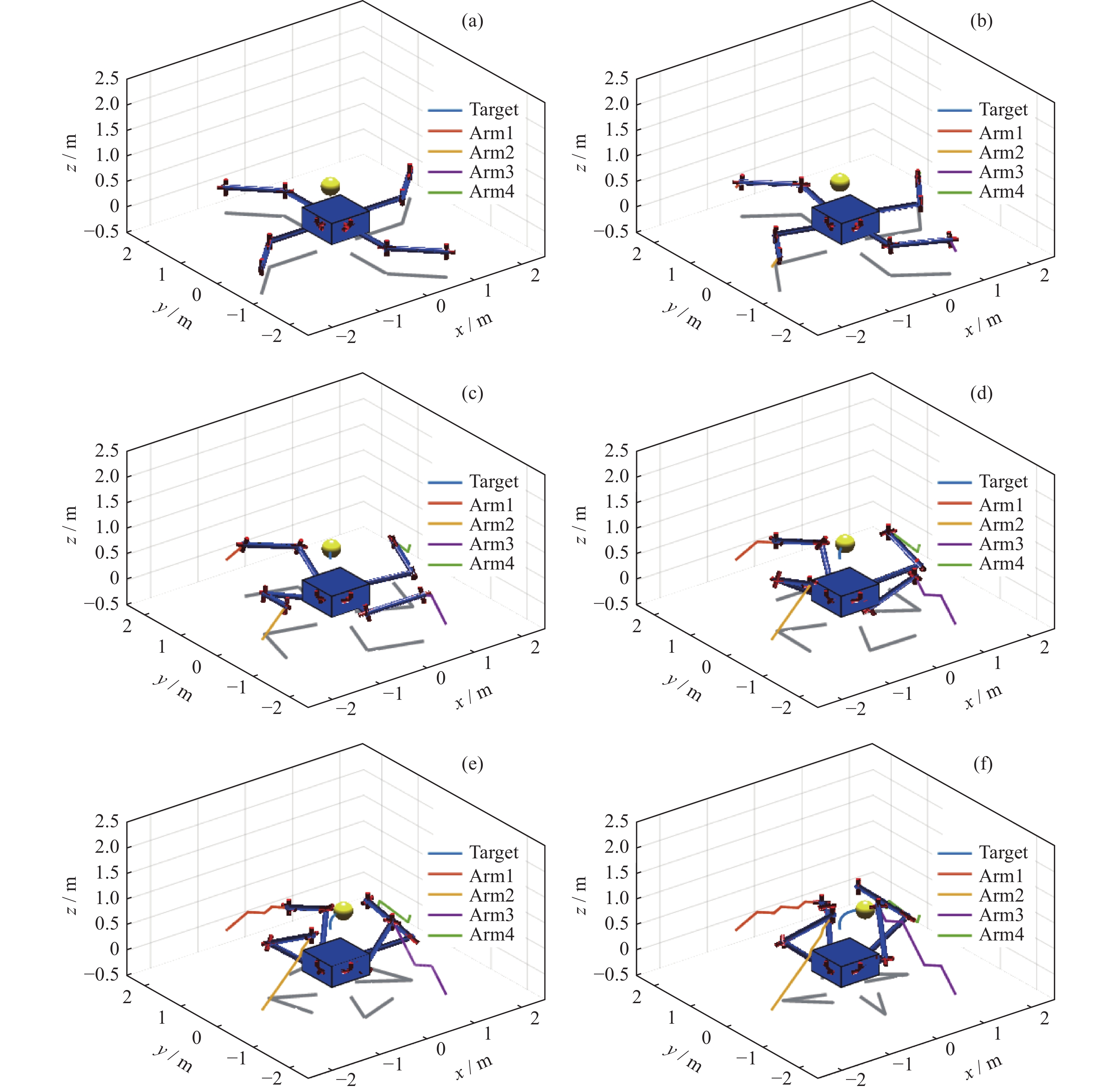
图 8 部分机械臂双层博弈行为
Figure 8. Partial schematic diagram of the manipulators in the two-level game
表 1 机械臂DH参数
Table 1. DH parameters of the manipulator
编号$i$ αi/(°) ${{{a_i}} / {\text{m}}}$ ${{{d_i}} / {\text{m}}}$ θi/(°) 1 –90 0 0 ${\theta _1}$ 2 90 0 0 ${\theta _2}$ 3 –90 0 1 ${\theta _3}$ 4 90 0 0 ${\theta _4}$ 5 90 0 1 ${\theta _5}$ 6 90 0 0 ${\theta _6}$ 7 0 0 0 ${\theta _7}$  下载: 导出CSV
下载: 导出CSV
表 2 机械臂仿真初始参数
Table 2. Initial parameters of the simulation
臂序号 根部坐标/m 初始构型/(°) 1 (0,0.4,0) [0,90,90,45,90,90,0] 2 (–0.4,0,0) [0,180,90,45,90,90,0] 3 (0,–0.4,0) [0,–90,90,45,90,90,0] 4 (0.4,0,0) [0,0,90,45,90,90,0]
下载: 导出CSV
-
[1] FLORES-ABAD A, MA O, PHAM K, et al. A review of space robotics technologies for on-orbit servicing[J]. Progress in Aerospace Sciences, 2014, 68: 1-26 doi: 10.1016/j.paerosci.2014.03.002 [2] LI W J, CHENG D Y, LIU X G, et al. On-orbit service (OOS) of spacecraft: a review of engineering developments[J]. Progress in Aerospace Sciences, 2019, 108: 32-120 doi: 10.1016/j.paerosci.2019.01.004 [3] 徐文福. 空间机器人目标捕获的路径规划与实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2007XU Wenfu. Path Planning and Experiment Study of Space Robot for Target Capturing[D]. Harbin: Harbin Institute of Technology, 2007 [4] 岳程斐, 张枭, 王宏旭, 等. 在轨操控机器人拓邻域搜索三维路径规划[J]. 宇航学报, 2022, 43(2): 206-213 doi: 10.3873/j.issn.1000-1328.2022.02.009YUE Chengfei, ZHANG Xiao, WANG Hongxu, et al. Three-dimensional path planning of on-orbit manipulation robot based on neighborhood continuation search[J]. Journal of Astronautics, 2022, 43(2): 206-213 doi: 10.3873/j.issn.1000-1328.2022.02.009 [5] HOYT R P, CUSHING J I, SLOSTAD J T, et al. SpiderFab: an architecture for self-fabricating space systems[C]//AIAA SPACE 2013 Conference and Exposition. San Diego, CA: AIAA, 2013. DOI: 10.2514/6.2013-5509 [6] WARREN C W. Global path planning using artificial potential fields[C]//1989 International Conference on Robotics and Automation. Scottsdale, AZ, USA: IEEE, 1989. DOI: 10.1109/ROBOT.1989.100007 [7] KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[M]//COX I J, WILFONG G T. Autonomous Robot Vehicles. New York: Springer, 1986. DOI: 10.1007/978-1-4613-8997-2_29 [8] PURIYANTO R D, WAHYUNGGORO O, CAHYADI A I. Improved artificial potential field algorithm based multi-local minimum solution[J]. Engineering Letters, 2021, 29(3): 1277-1286 [9] BOHLIN R, KAVRAKI L E. Path planning using lazy PRM[C]//Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings. San Francisco, CA, USA: IEEE, 2000. DOI: 10.1109/ROBOT.2000.844107 [10] 贾庆轩, 陈钢, 孙汉旭, 等. 基于A*算法的空间机械臂避障路径规划[J]. 机械工程学报, 2010, 46(13): 109-115 doi: 10.3901/JME.2010.13.109JIA Qingxuan, CHEN Gang, SUN Hanxu, et al. Path planning for space manipulator to avoid obstacle based on A* algorithm[J]. Journal of Mechanical Engineering, 2010, 46(13): 109-115 doi: 10.3901/JME.2010.13.109 [11] DUCHOŇ F, BABINEC A, KAJAN M, et al. Path planning with modified a star algorithm for a mobile robot[J]. Procedia Engineering, 2014, 96: 59-69 doi: 10.1016/j.proeng.2014.12.098 [12] YAO J F, LIN C, XIE X B, et al. Path planning for virtual human motion using improved A* star algorithm[C]//2010 Seventh International Conference on Information Technology: New Generations. Las Vegas, NV, USA: IEEE, 2010. DOI: 10.1109/ITNG.2010.53 [13] GUO Y N, PAN Q, SUN Q, et al. Cooperative game-based multi-agent path planning with obstacle avoidance[C]//2019 IEEE 28th International Symposium on Industrial Electronics (ISIE). Vancouver, BC, Canada: IEEE, 2019. DOI: 10.1109/ISIE.2019.8781205 [14] SHEN D, CHEN G S, CRUZ J B, et al. A game theoretic data fusion aided path planning approach for cooperative UAV ISR[C]//2008 IEEE Aerospace Conference. Big Sky, MT, USA: IEEE, 2008. DOI: 10.1109/AERO.2008.4526563 [15] LEE D S, PERIAUX J, GONZALEZ L F. UAS mission path planning system (MPPS) using hybrid-game coupled to multi-objective optimizer[J]. Journal of Dynamic Systems, Measurement, and Control, 2010, 132(4): 041005 doi: 10.1115/1.4001336 [16] WANG S, WEN J Z, ZHOU D C, et al. A game-based fault-tolerant path planning algorithm for space manipulator[C]//2021 IEEE International Conference on Mechatronics and Automation (ICMA). Takamatsu, Japan: IEEE, 2021. DOI: 10.1109/ICMA52036.2021.9512817 [17] SHIMIZU M, KAKUYA H, YOON W K, et al. Analytical inverse kinematic computation for 7-DOF redundant manipulators with joint limits and its application to redundancy resolution[J]. IEEE Transactions on Robotics, 2008, 24(5): 1131-1142 doi: 10.1109/TRO.2008.2003266 -
-

 下载:
下载:





计量
- 文章访问数: 944
- HTML全文浏览量: 735
- PDF下载量: 70
-
被引次数:
0(来源:Crossref)
0(来源:其他)

