


2016HO3探测任务星载光学观测量建模及定轨
doi: 10.11728/cjss2023.03.2022-0026 cstr: 32142.14.cjss2023.03.2022-0026
Optical Observations and Its Application on Orbit Determination for 2016HO3 Exploration
-
摘要: 以中国首次小行星探测任务为背景,根据星载相机获取的光学影像构造三种观测量,分别为小行星相对于航天器的高度角和方位角、赤经赤纬以及探测器与行星/小行星之间的夹角,分析了其在探测器定轨中的作用。仿真定轨结果表明,观测时长为100 h,探测器三轴位置误差小于50 km,满足工程上对巡航段的轨道精度要求,但x和y方向的位置和速度分量具有较强自相关性。此外还发现,使用单一观测数据类型比联合观测量的定轨精度低3~4个量级,第三类观测量相对于其他两类观测量在定轨精度方面具有显著作用,这表明在2016HO3探测中,利用太阳系大天体的位置信息有助于约束探测器轨道,提高探测器的定轨精度。
-
关键词:
- 光学导航 /
- 精密定轨 /
- 小行星469219(Kamo`oalewa) /
- 小行星探测
Abstract: Since an upcoming Chinese asteroid mission will target a near Earth asteroid Kamo`oalewa (2016HO3) and a main-belt comets 311P/PANSTARRS, a full simulation analysis has been made on the spacecraft optical navigation based on three types of optical observations collected by on-board cameras. The observations include the elevation and azimuth angle relative to the camera body coordinate system, the right ascension and declination in the celestial reference system, the angle between asteroid and the planets relative to the spacecraft. The dynamical model of the asteroid exploration mission was firstly built and then the celestial bodies could be observed during the mission for the third model was selected, which helped to determine the observation scheme and the pointing direction of the camera. Based on such setting, the observation was simulated which error is about one arcsecond and then the spacecraft orbit determination was calculated. The results indicated that when the observation time reaches 100 h, the 3D position accuracy of the spacecraft could reach 50 km, thus technically meeting the navigation requirement. However, the position and velocity in x and y direction are strongly autocorrelated, which means that the spacecraft position in xy plane cannot be easily constrained using only these optical observations. Meanwhile, the results also shown that the orbit determination accuracy based on single observation type data is 3~4 orders of magnitude lower than that of joint observations. The third-type observations make a much more significant contribution with respect to another two kinds of observations which indicates that the precise position of the solar system bodies is helpful when constraining the position of a spacecraft for 2016HO3 exploration. -
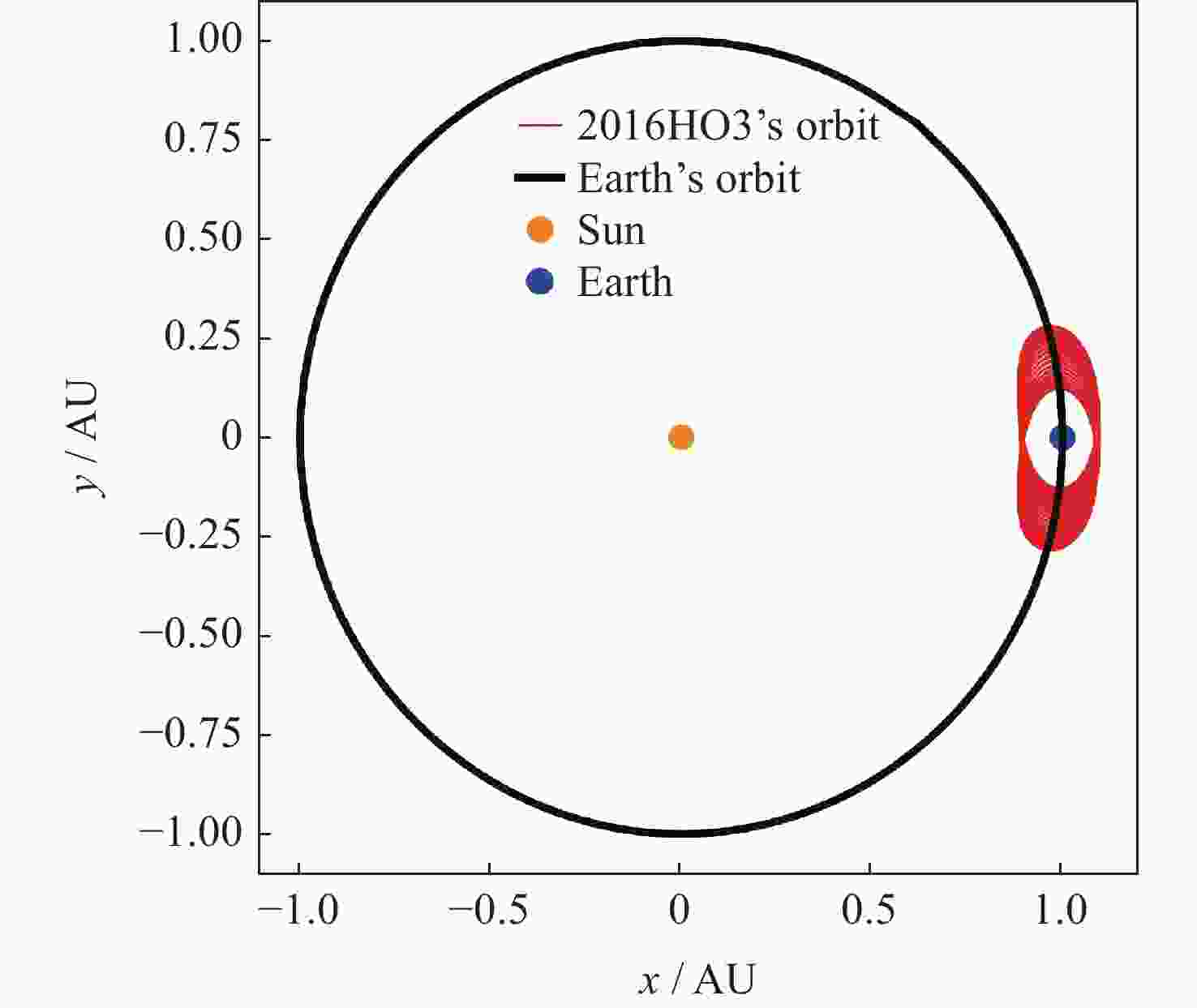
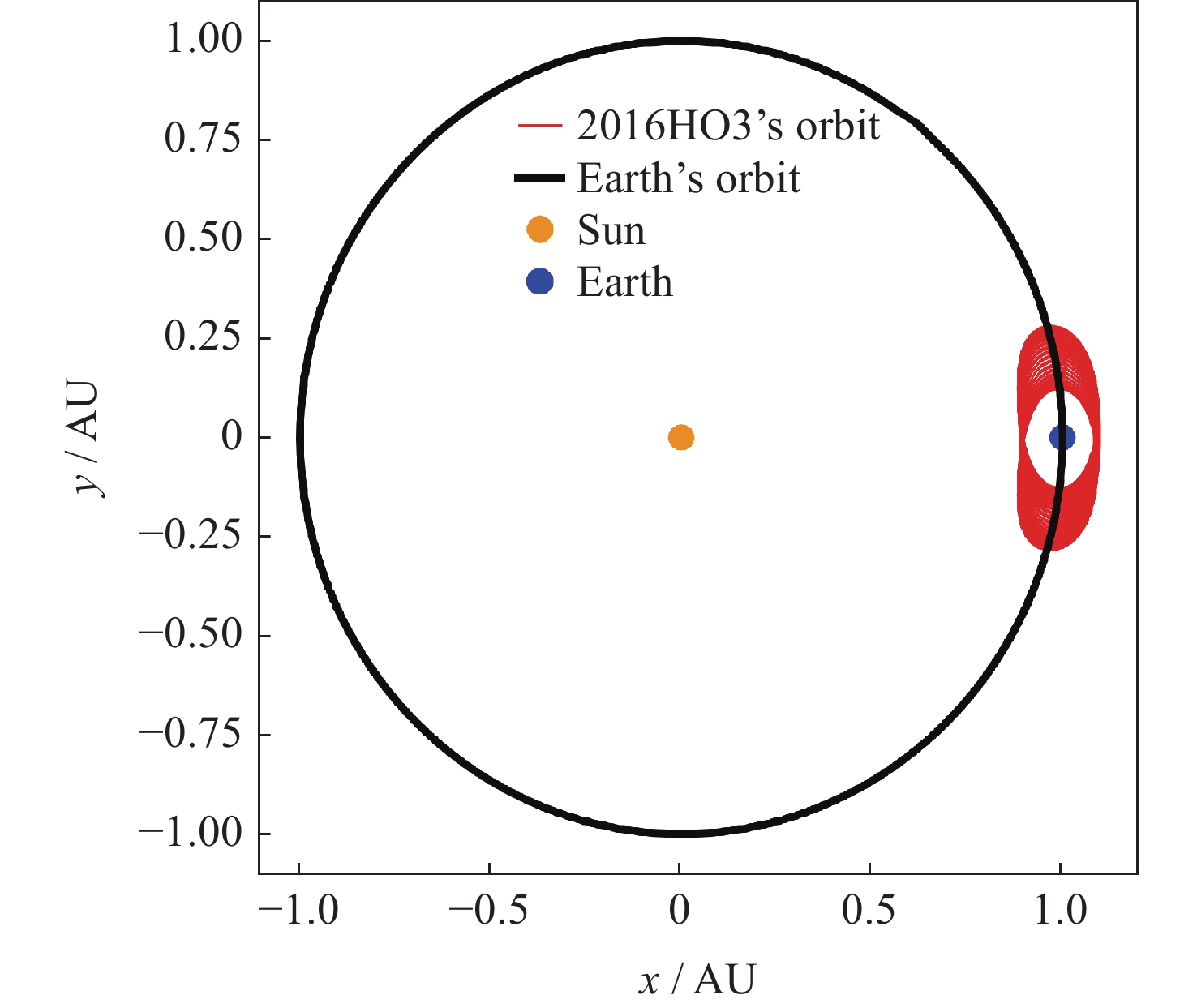
图 2 J2000.0日心黄道坐标系下2016HO3轨道的演化
Figure 2. 2016HO3 orbit evolution in J2000.0 ecliptic coordinate system
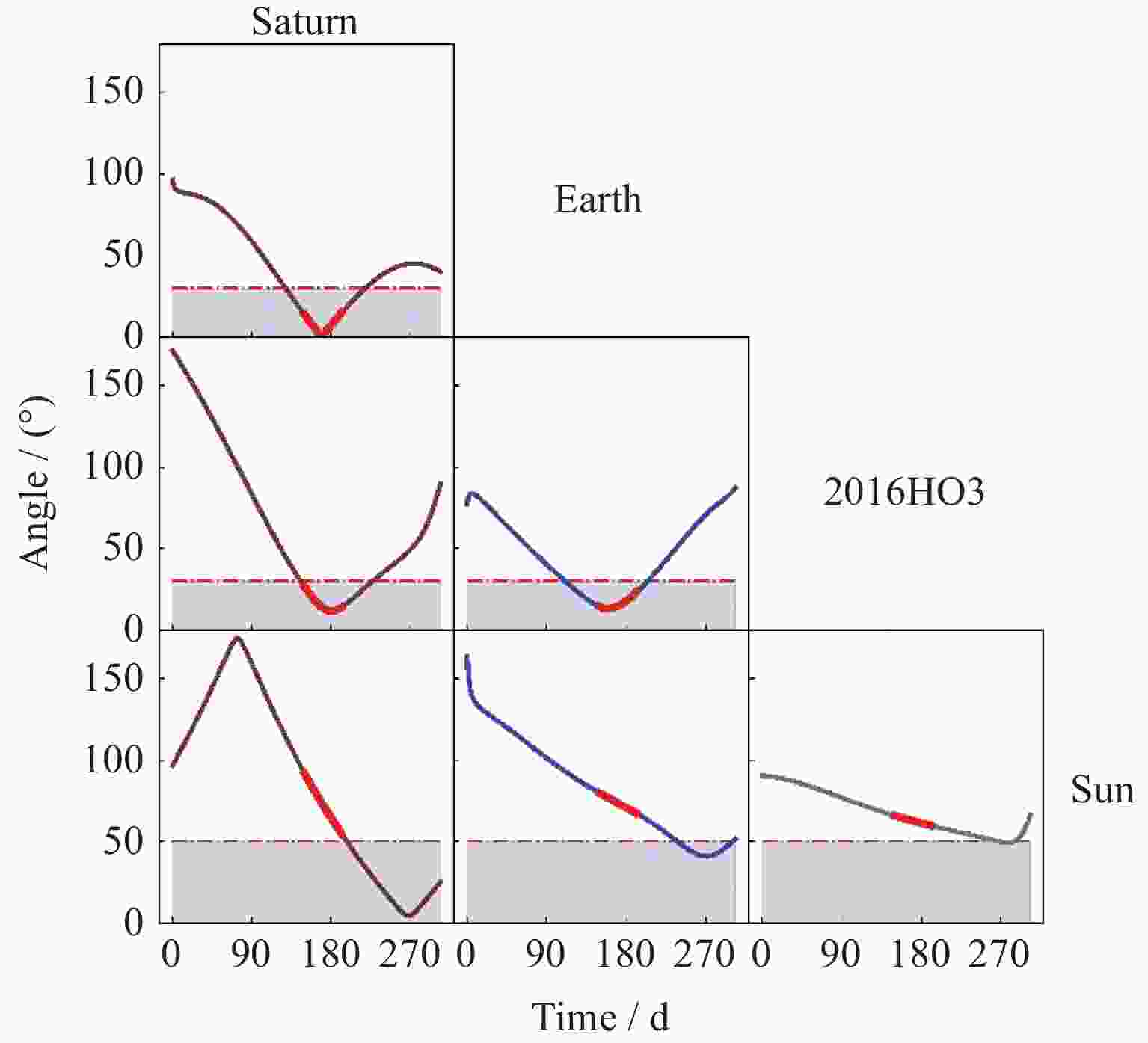
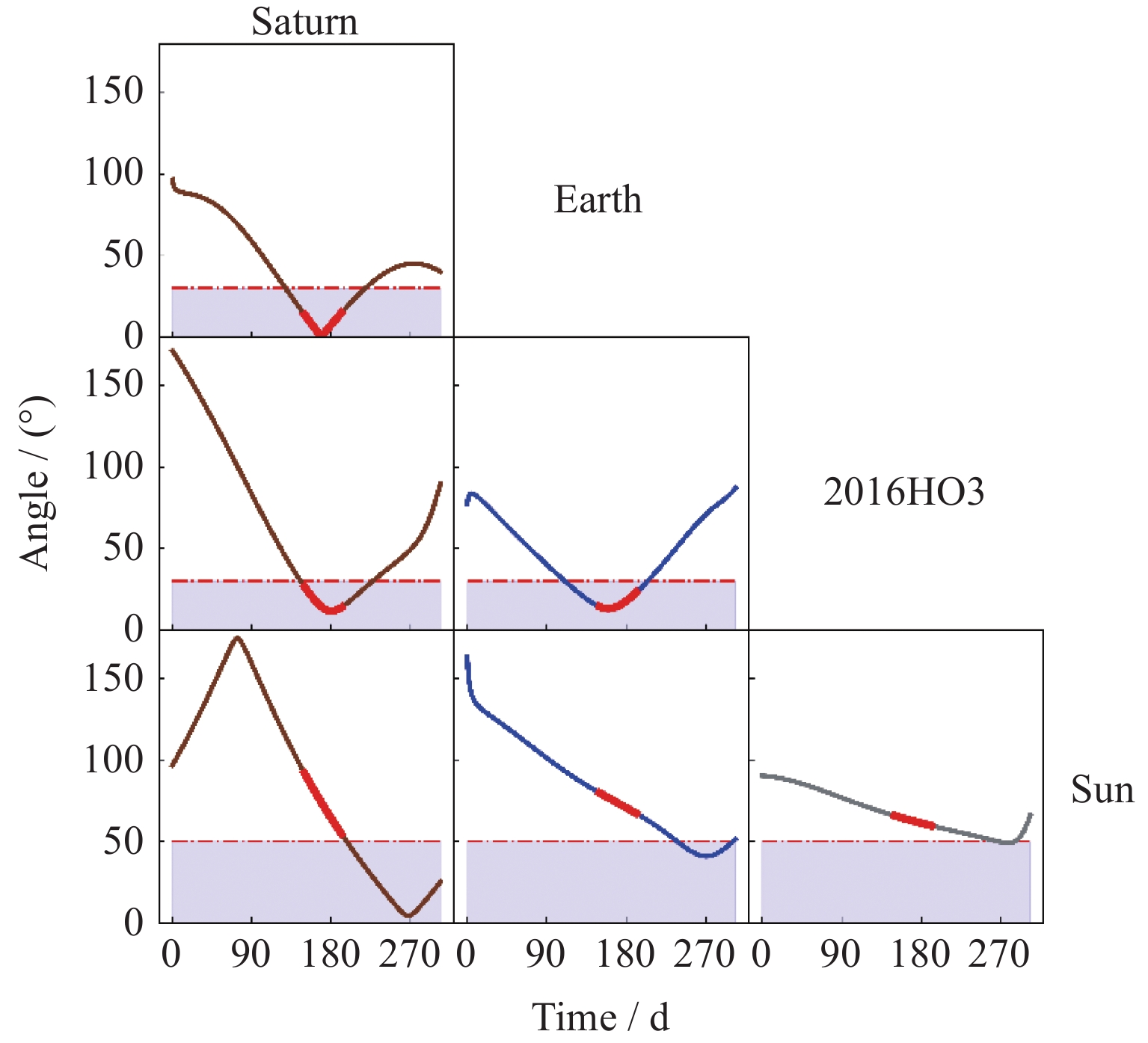
图 3 太阳、土星、地球及2016HO3相对于探测器的观测夹角
Figure 3. Angle between the Sun, 2016HO3, Earth and Saturn relative to the spacecraft
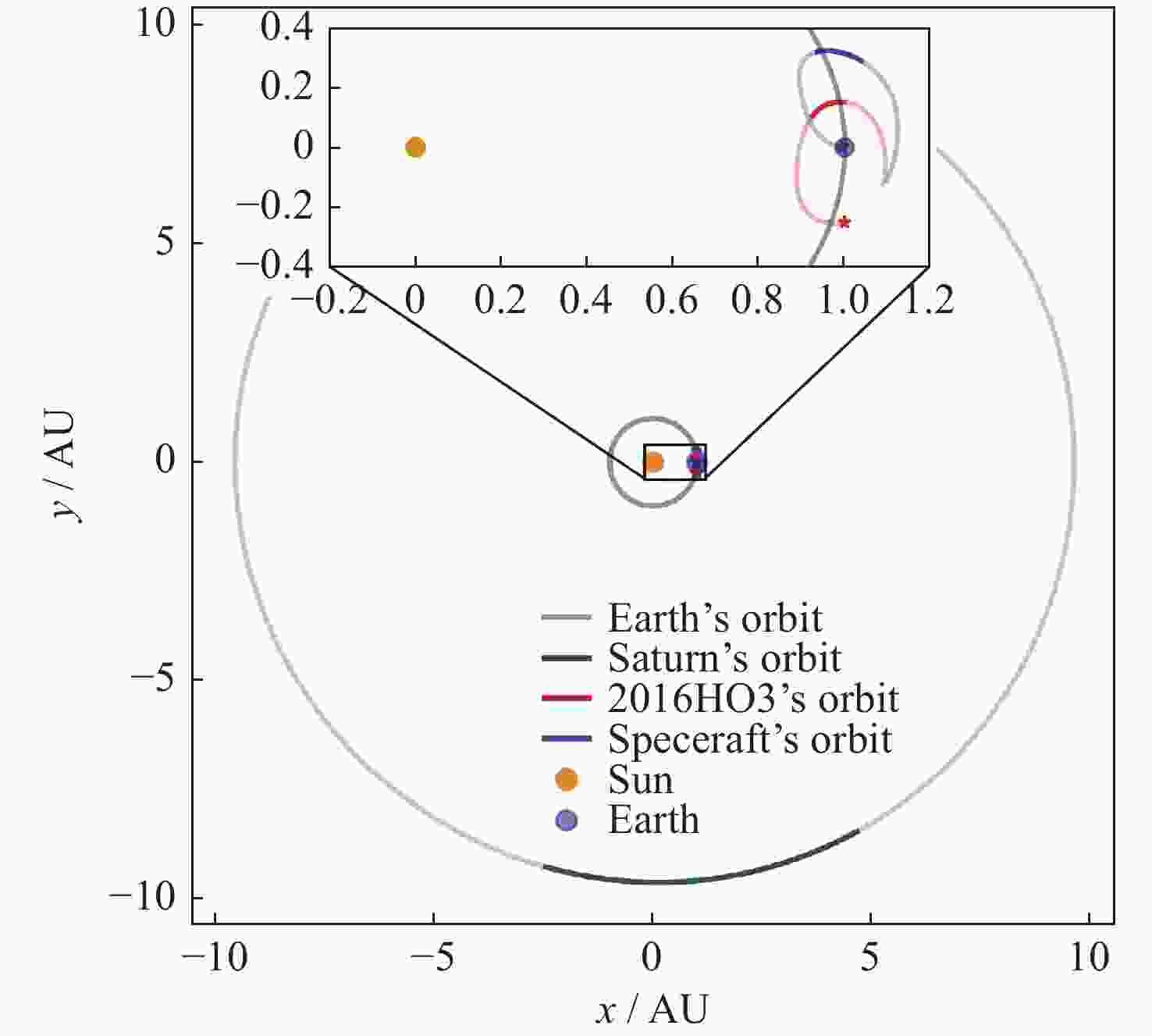
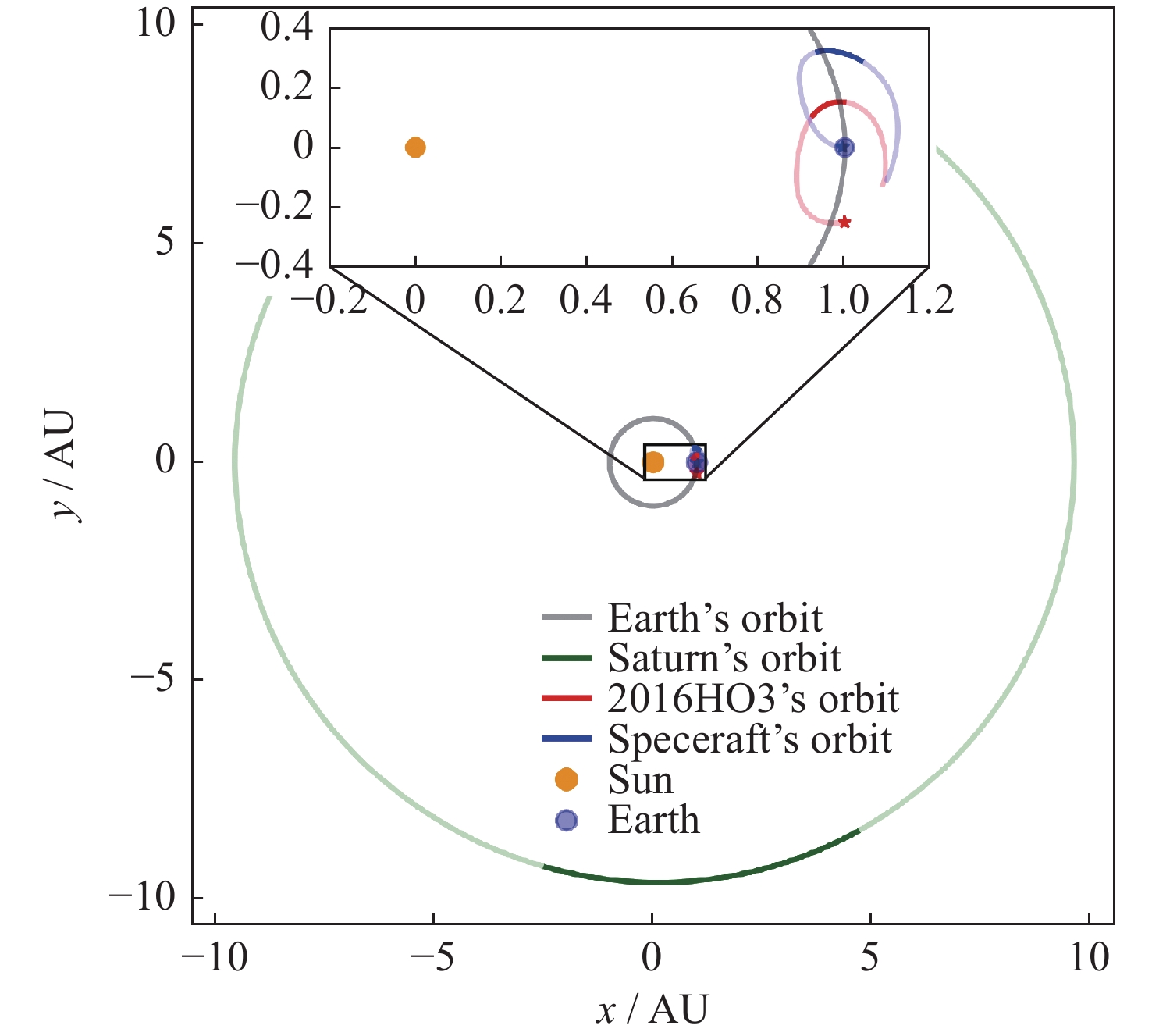
图 4 探测器、2016HO3和土星相对地球的位置
Figure 4. Orbit of spacecraft, 2016HO3 and Saturn with repesct to the Earth
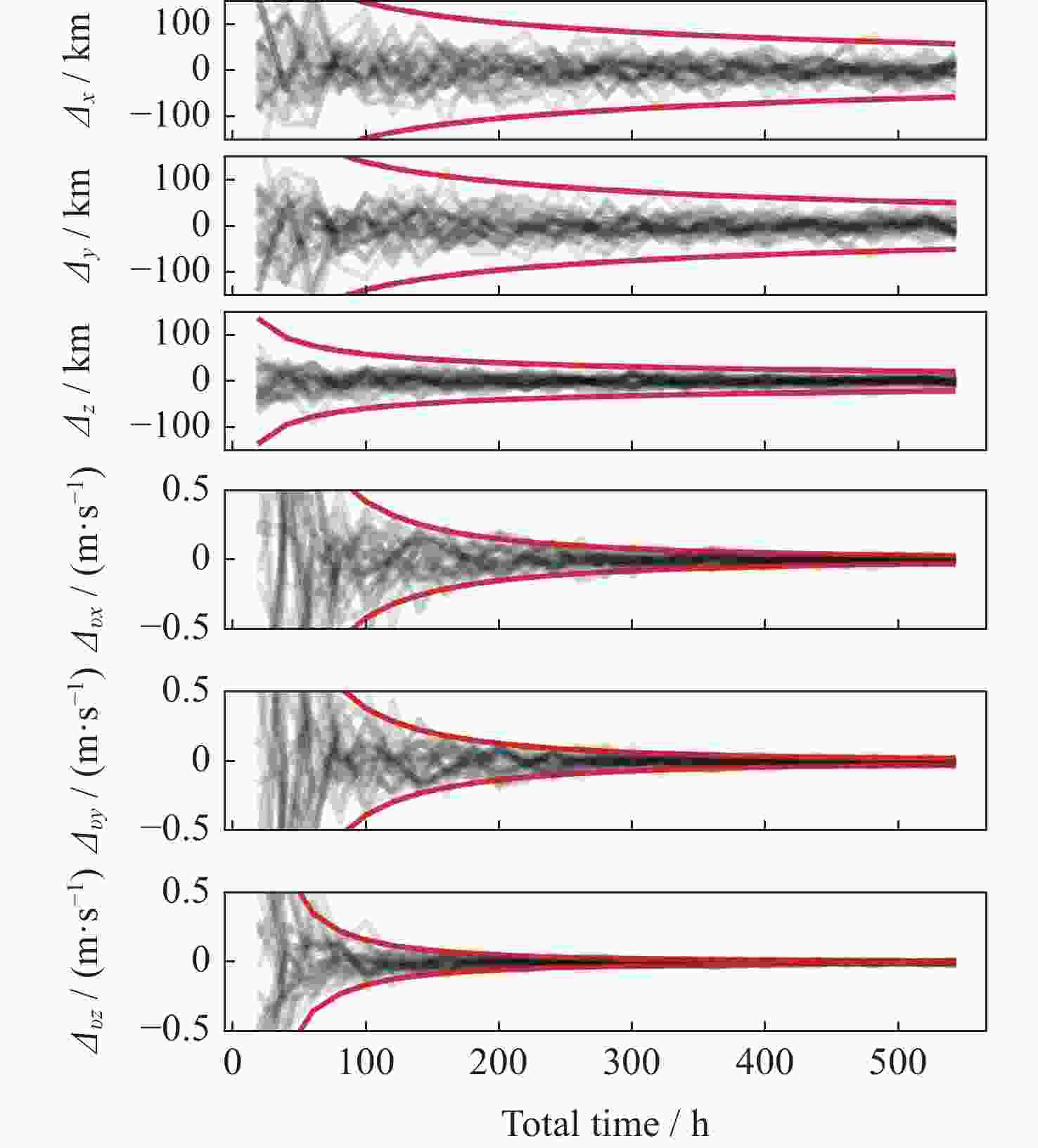
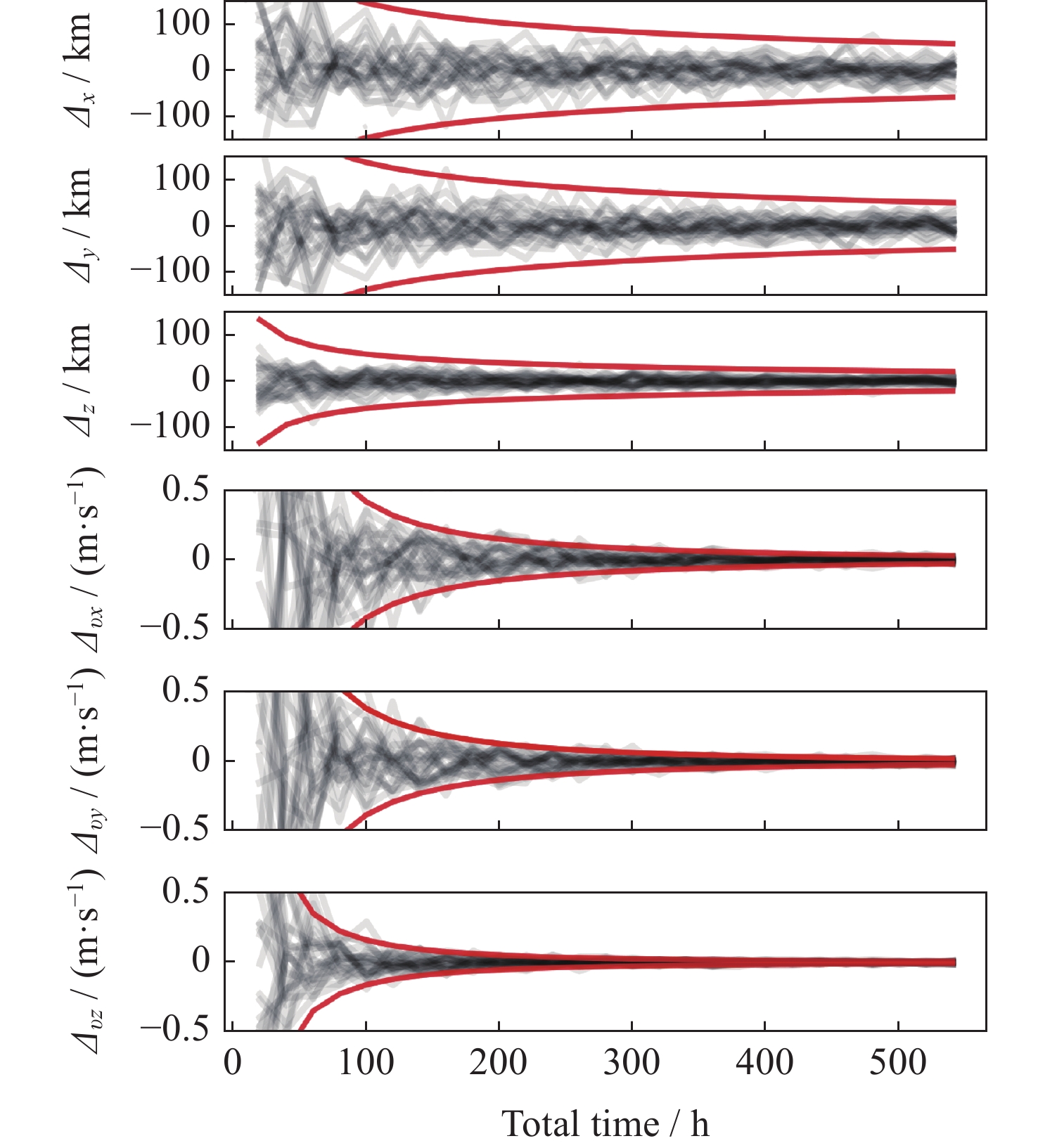
图 6 定轨误差与观测时长关系
Figure 6. Relationship between orbit determination accuracy and the observation time
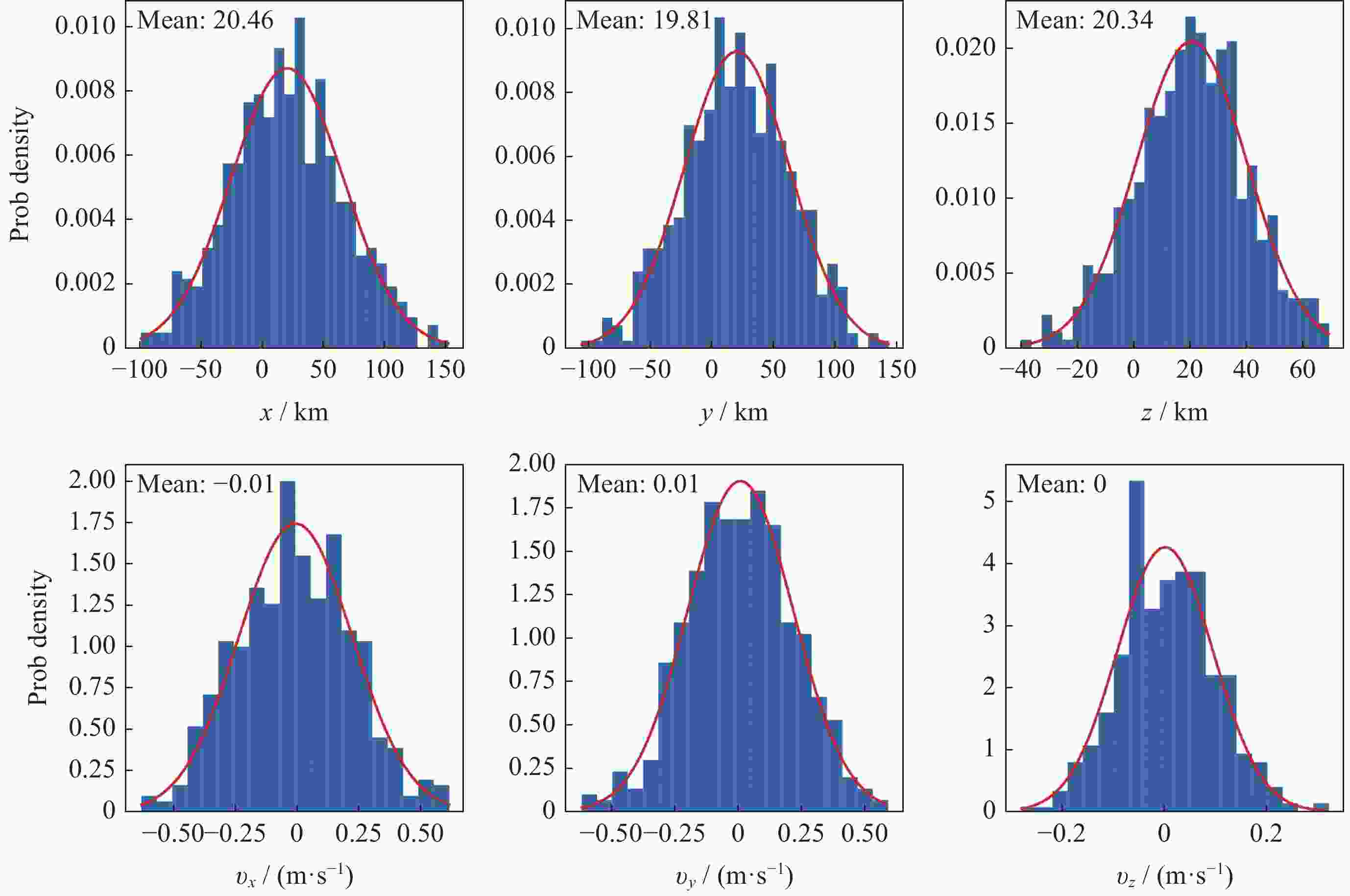
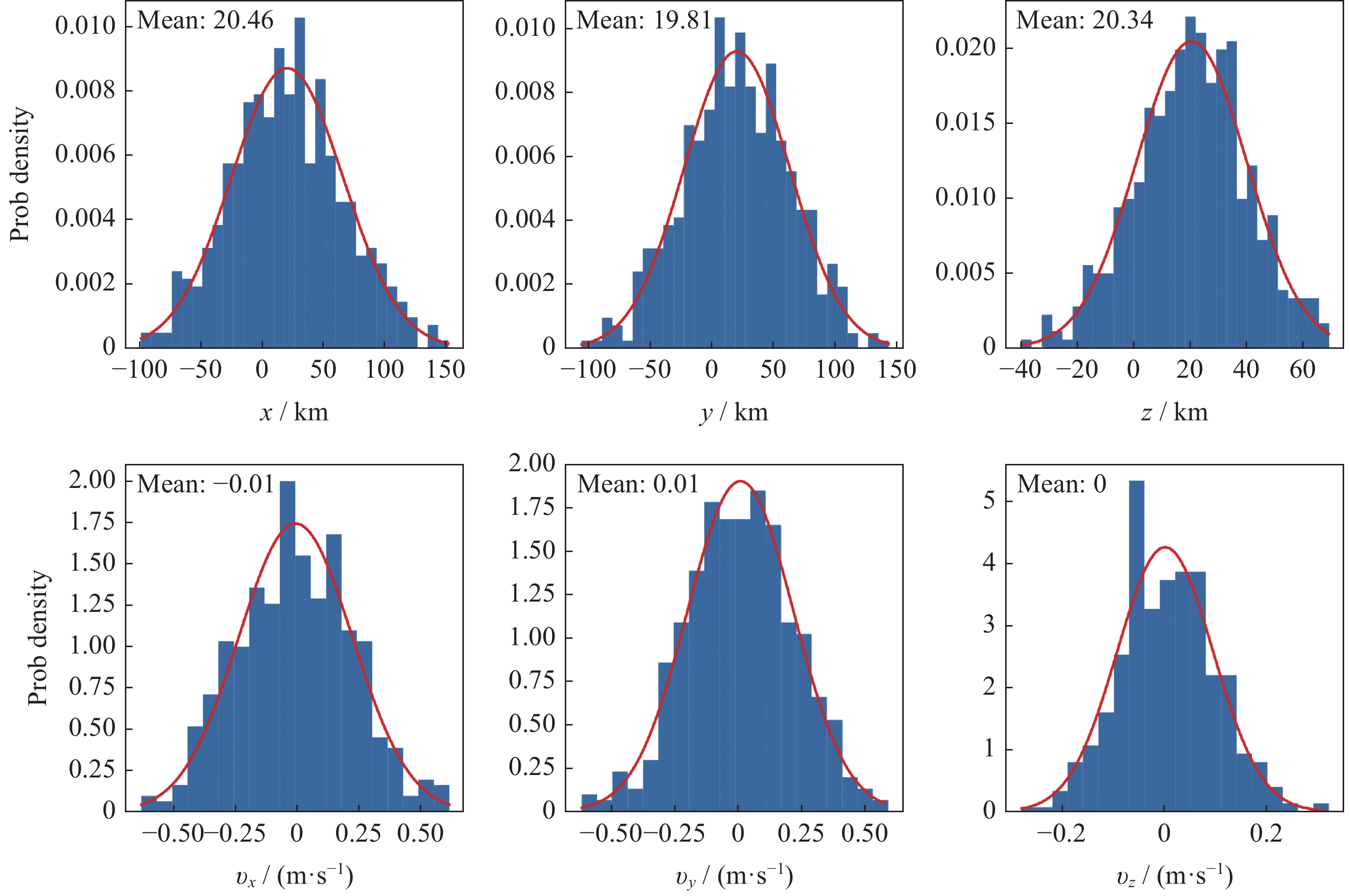
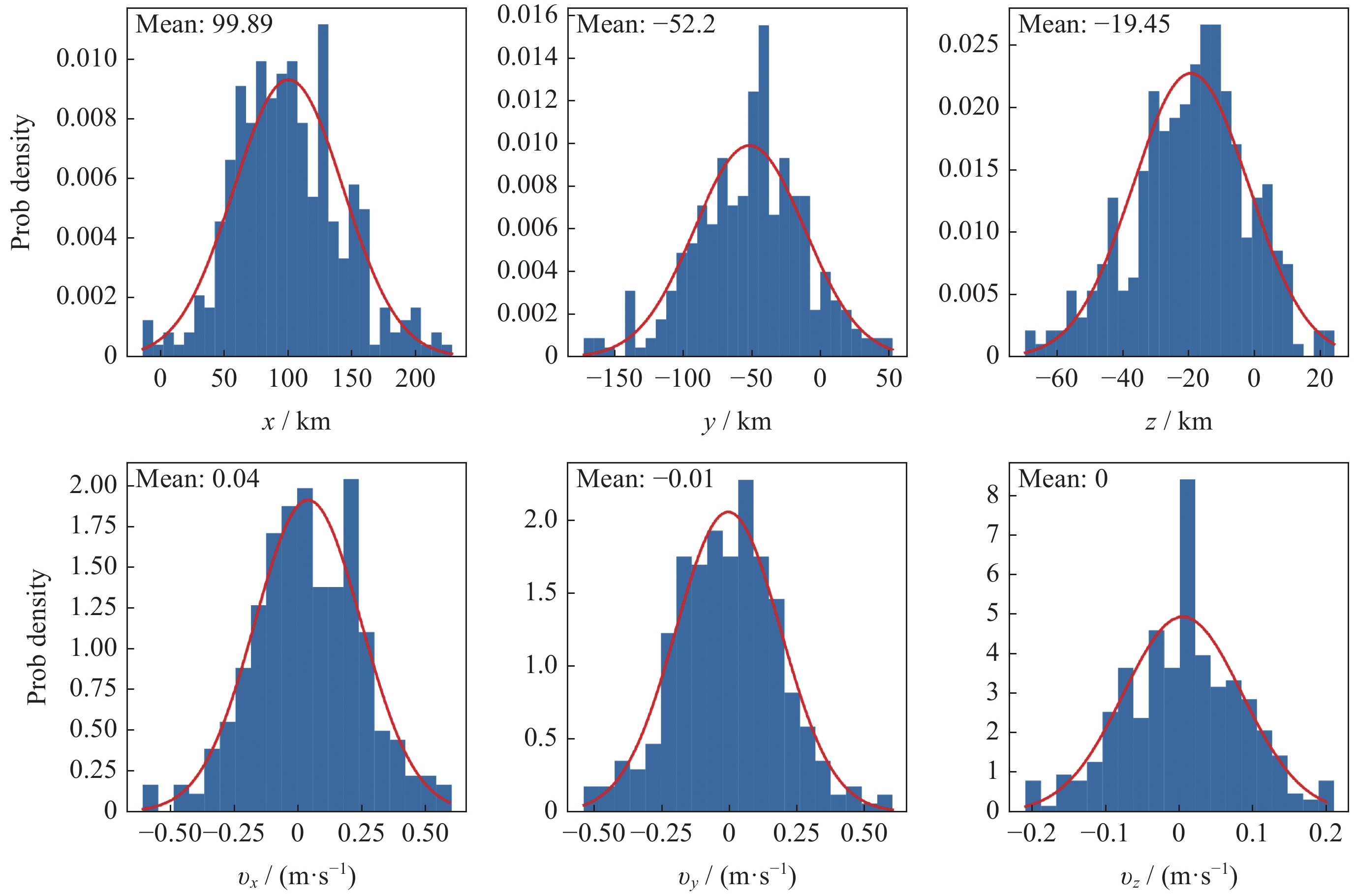
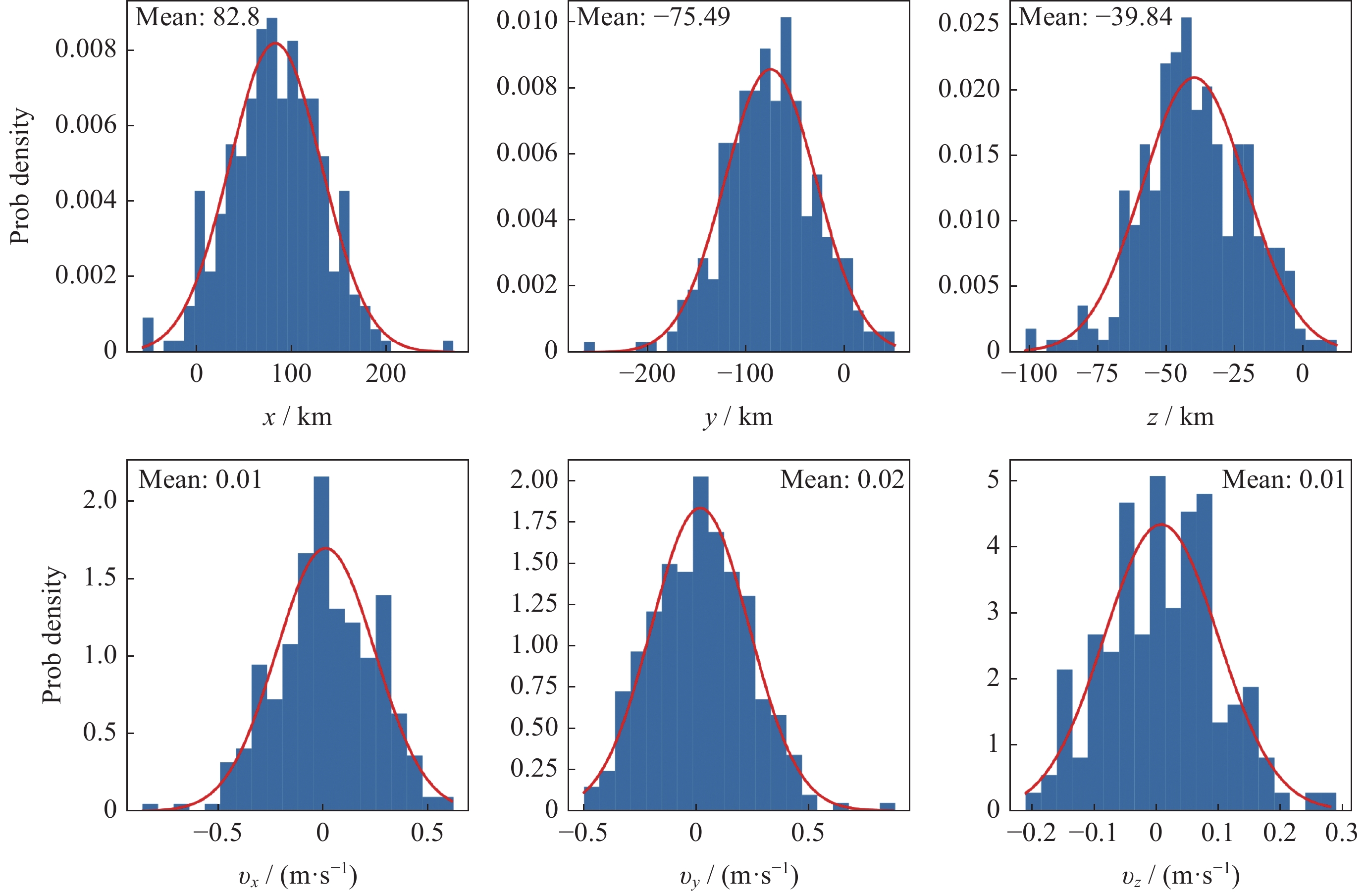
图 8 添加三方向系统误差(蓝色直方图为300次蒙特卡罗仿真的概率分布,红色曲线为由仿真案例中轨道误差的标准差和均值绘制的高斯分布曲线)
Figure 8. Adding system error in position (In each subplot, the blue histogram indicates the probability density of a 300-time Monte Carlo simulation. The red line represents the Gaussian distribution derived from the standard deviation and average value of the datasets)
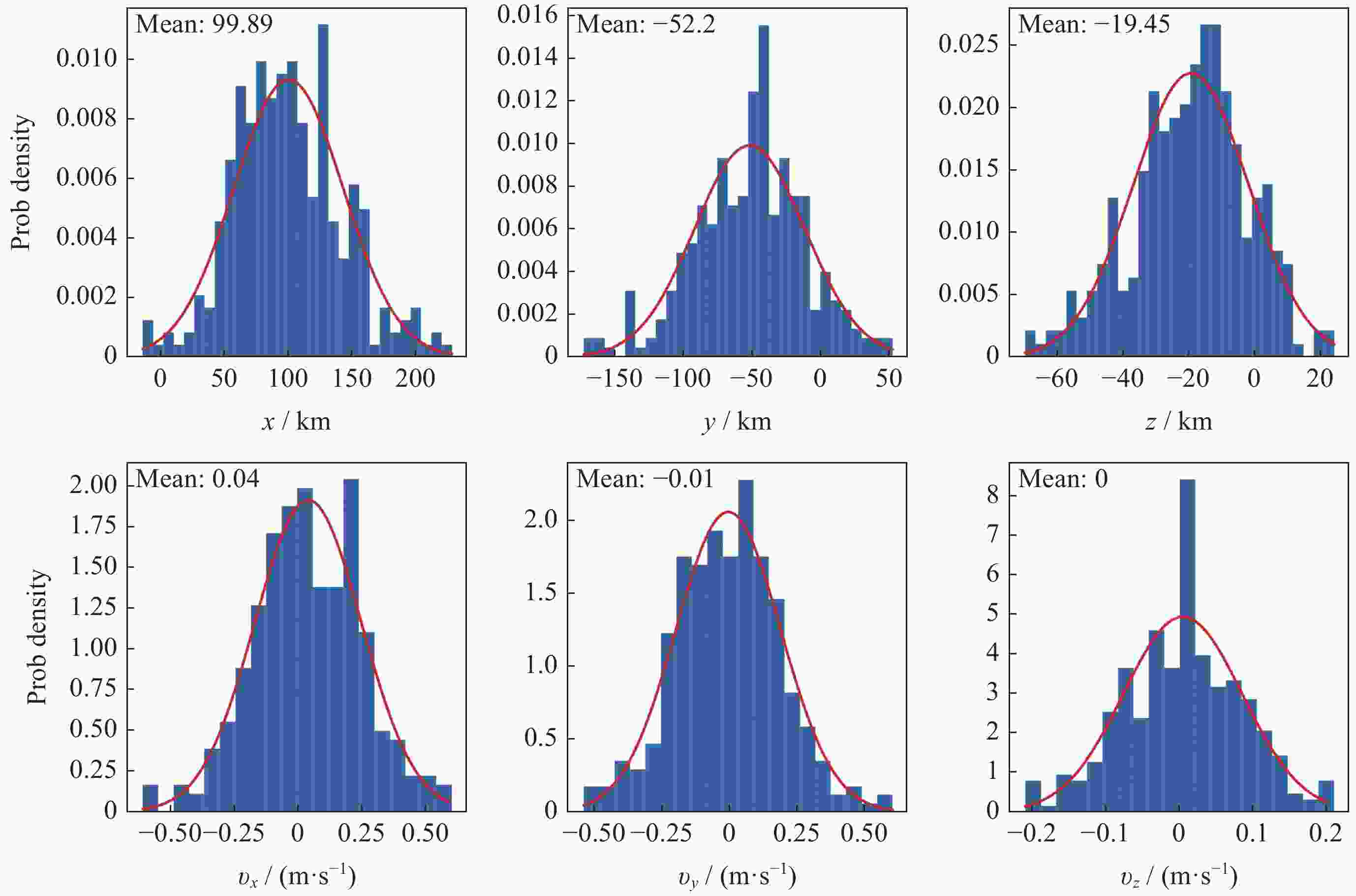
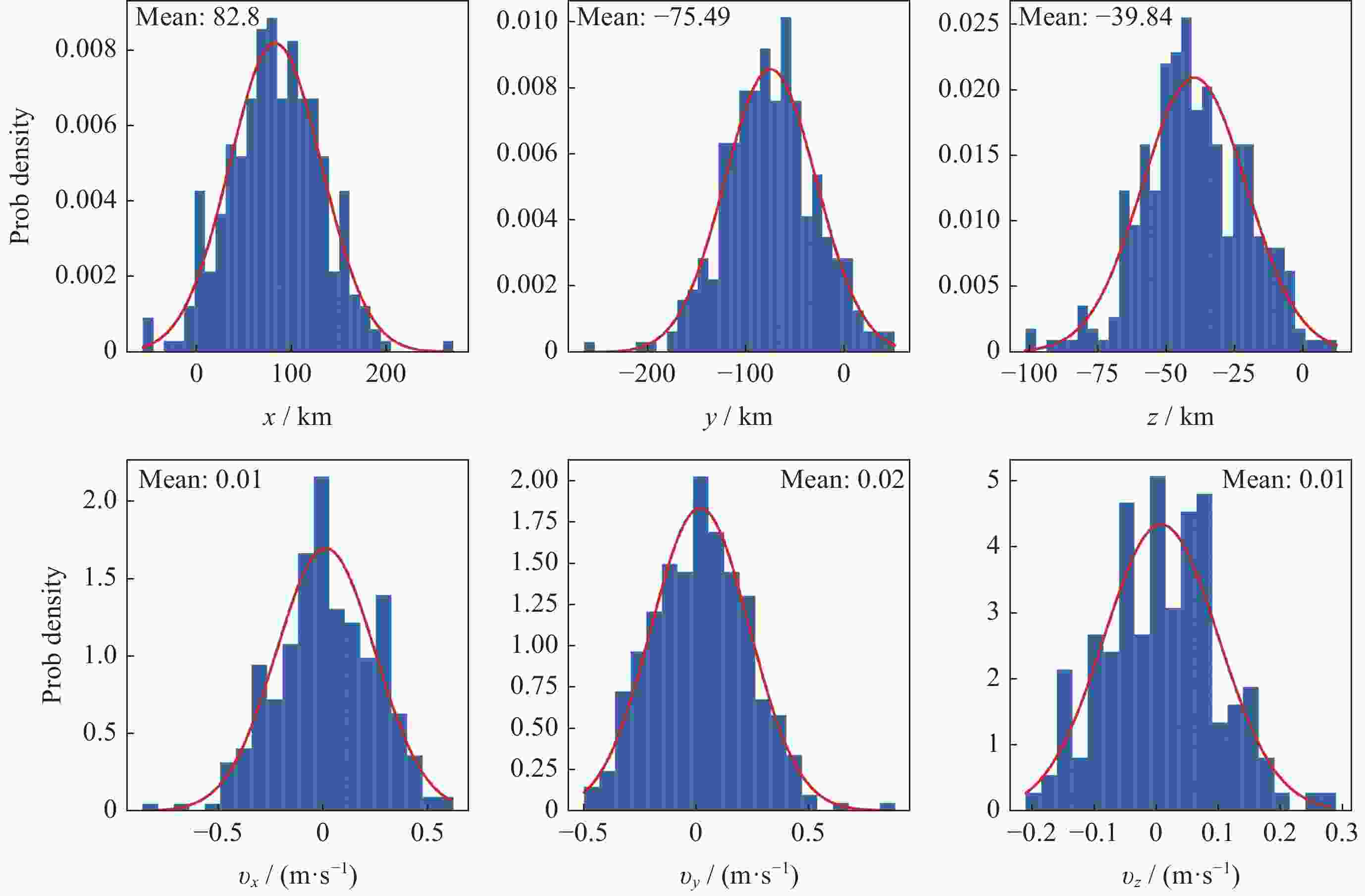
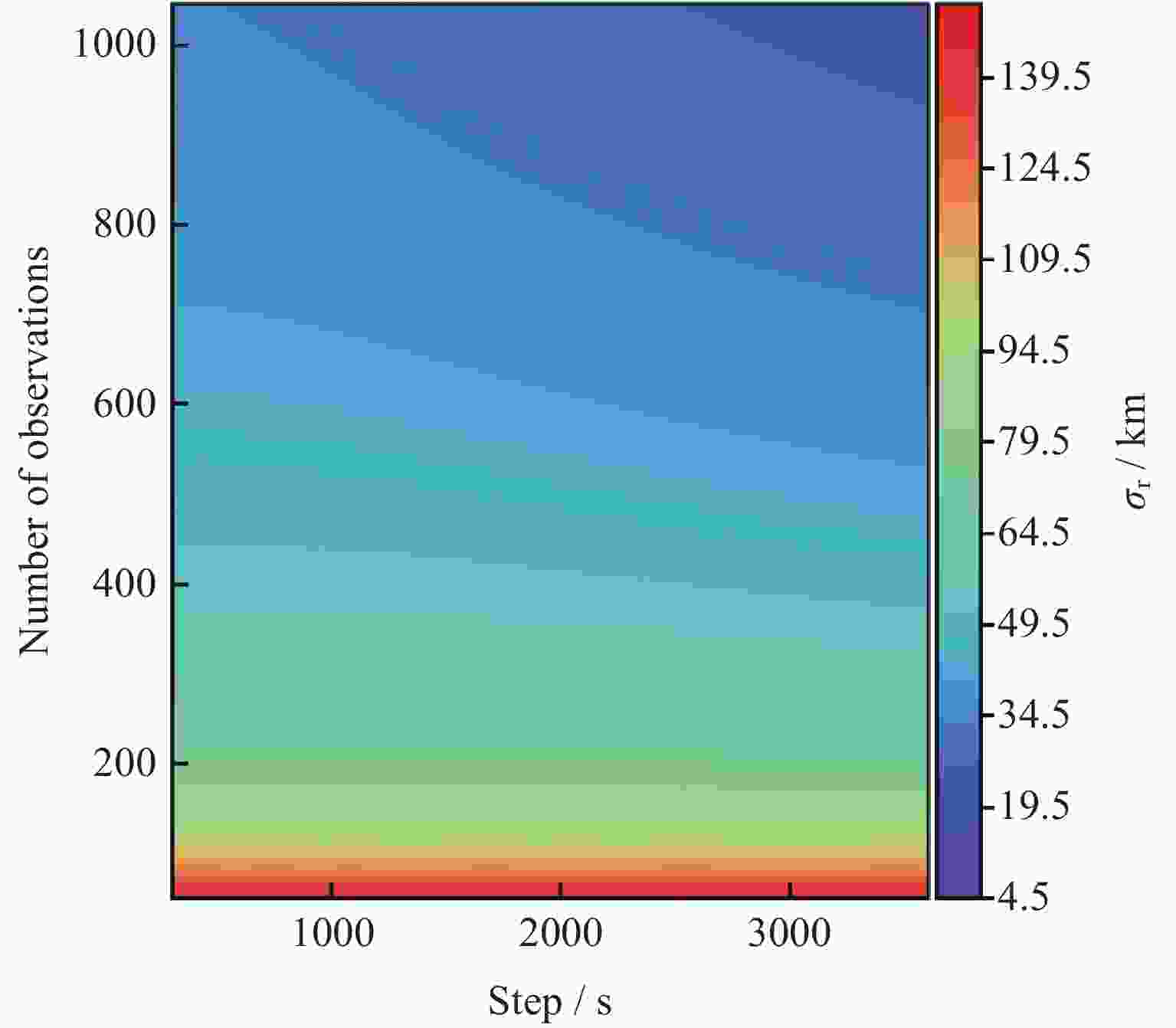
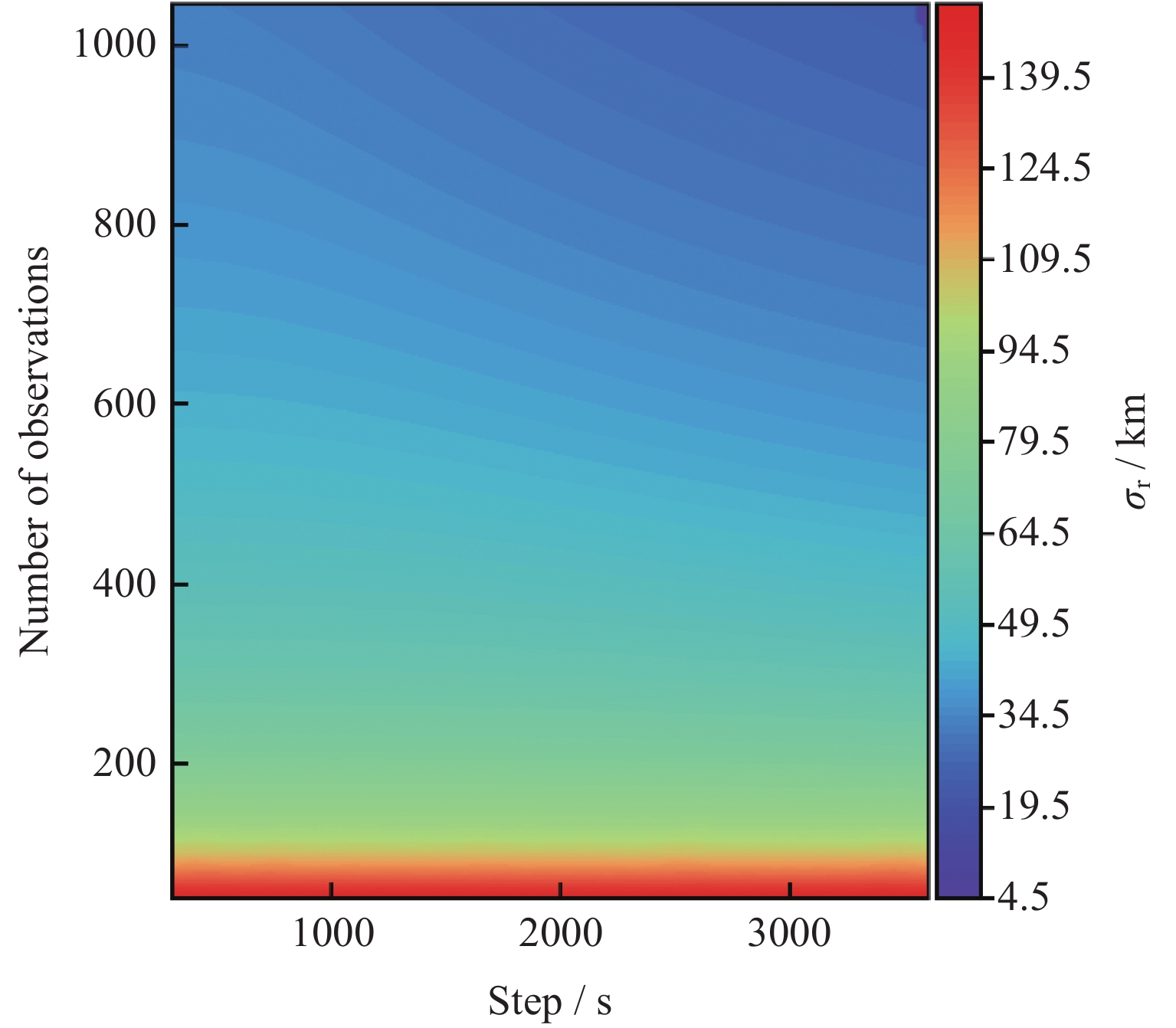
图 11 定轨精度随观测间隔和观测组数的变化
Figure 11. Relationship between the orbit determination accuracy and the observation’s interval and length
表 1 导航相机参数
Table 1. Navigation camera parameter
相机参数 数值 焦距/mm 15.0 视场/(o) 29.8 像素提取误差/pixel 0.01 相机指向误差/rad 1.0×10–5 像素转换信息/(pixel·mm–1) 250.0  下载: 导出CSV
下载: 导出CSV
表 2 考虑系统误差与不考虑时定轨精度($ 1\mathrm{\sigma } $)的对比结果
Table 2. Comparison results of orbit determination accuracy ($ 1\mathrm{\sigma } $) when considering systematic error and not
案例 系统误差 $ x/\mathrm{k}\mathrm{m} $ $ y/\mathrm{k}\mathrm{m} $ $ z/\mathrm{k}\mathrm{m} $ vx/(m·s–1) vy/(m·s–1) vz/(m·s–1) A 三方向20 km 45.83 42.91 19.56 0.23 0.21 0.09 B 观测量$0.1'' $ 48.74 46.59 45.33 0.23 0.22 0.23 C 叠加 42.82 40.22 17.54 0.21 0.19 0.08 D 不添加 45.57 42.85 18.70 0.22 0.21 0.09
下载: 导出CSV
表 3 组合观测量定轨精度($1\mathrm{\sigma } $)结果
Table 3. Orbit determination accuracy ($1\mathrm{\sigma } $) results based on combined observations
模型 $ x/\mathrm{k}\mathrm{m} $ $ y/\mathrm{k}\mathrm{m} $ $ z/\mathrm{k}\mathrm{m} $ vx/(m·s–1) vy/(m·s–1) vz/(m·s–1) 模型1 $ 10.64\times {10}^{5} $ $ 97.50\times {10}^{4} $ $ 33.27\times {10}^{4} $ 54.70 256.17 153.21 模型2 $ 68.10\times {10}^{4} $ $ 62.37\times {10}^{4} $ $ 21.28\times {10}^{4} $ 34.69 164.02 98.05 模型3 $ 10.37\times {10}^{3} $ $ 62.93\times {10}^{2} $ $ 26.47\times {10}^{3} $ 16.67 10.55 36.09 模型1,2 $ 50.02\times {10}^{4} $ $ 45.81\times {10}^{4} $ $ 15.63\times {10}^{4} $ 26.00 120.03 71.87 模型1,3 50.05 49.57 25.70 0.25 0.24 0.12 模型2,3 49.09 46.66 21.95 0.24 0.22 0.10
下载: 导出CSV
-
[1] JI Jianghui, WANG Su. China’s Future Missions for Deep Space Exploration and Exoplanet Space Survey by 2030. Chin. J. Space Sci. , 2020, 40(5): 729-731. [2] 李俊峰, 崔文, 宝音贺西. 深空探测自主导航技术综述[J]. 力学与实践, 2012, 34(2): 1-9LI J F, CUI W, BAOYIN H X. A survey of autonomous navigation for deep space exploration[J]. Mechanics in Engineering, 2012, 34(2): 1-9 [3] 房建成, 宁晓琳, 马辛, 等. 深空探测器自主天文导航技术综述[J]. 飞控与探测, 2018, 1(1): 1-15FANG J C, NING X L, MA X, et al. A survey of autonomous astronomical navigation technology for deep space detectors[J]. Flight Control Detection, 2018, 1(1): 1-15 [4] DRAPER C, WRIGLEY W, HOAG G, et al. Space navigation guidance and control, Vol. 1, of 2. NASA-CR-75543, 1965 [5] BHASKARAN S, RIEDEL J E, SYNNOTT S P, et al. The deep space 1 autonomous navigation system-a post-flight analysis[C]//AIAA/AAS Astrodynamics Specialist Conference. Denver, CO, USA: AIAA, 2000 [6] BHASKARAN S, DESAI S, DUMONT P, et al. Orbit determination performance evaluation of the deep space 1 autonomous navigation system[C]//Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, Univelt, Inc., San Diego, CA, 1998, pp. 1295–1314 [7] TSUDA Y, TAKEUCHI H, OGAWA N, et al. Rendezvous to asteroid with highly uncertain ephemeris: Hayabusa2’s Ryugu-approach operation result[J]. Astrodynamics, 2020, 4(2): 137-147 doi: 10.1007/s42064-020-0074-9 [8] DE LA FUENTE MARCOS C, DE LA FUENTE MARCOS R. Asteroid (469219) 2016 HO3, the smallest and closest Earth quasi-satellite[J]. Monthly Notices of the Royal Astronomical Society, 2016, 462(4): 3441-3456 doi: 10.1093/mnras/stw1972 [9] 田伟. 小行星(469219)Kamo`oalewa轨道的确定与误差分析[J]. 天文学报, 2021, 62(2): 16TIAN W. Orbit Determination of the asteroid (469219) Kamo`oalewa and its error analysis[J]. Acta Astronomica Sinica, 2021, 62(2): 16 [10] WANG M, CHENG Y F, YANG B, et al. On-orbit calibration approach for optical navigation camera in deep space exploration[J]. Optics Express, 2016, 24(5): 5536-5554 doi: 10.1364/OE.24.005536 [11] FEHLBERG E. Classical fifth-, sixth-, seventh-, and eighth-order Runge-Kutta formulas with stepsize controlR[R]. Washington: National Aeronautics and Space Administration, 1968 [12] ACTON JR C H. Ancillary data services of NASA’s navigation and ancillary information facility[J]. Planetary and Space Science, 1996, 44(1): 65-70 doi: 10.1016/0032-0633(95)00107-7 [13] 黄翔宇, 黄江川, 李骥, 等. 基于图像测量数据的目标接近段自主导航方法研究与试验[J]. 中国科学: 技术科学, 2013, 43(7): 748-754 doi: 10.1360/092013-481HUANG X Y, HUANG J C, LI J, et al. Autonomous navigation for the approach phase based on image measurement data[J]. Sci Sin Tech, 2013, 43(7): 748-754 doi: 10.1360/092013-481 [14] 崔文, 张少愚, 张树瑜, 等. 火星探测接近段的光学自主导航研究[J]. 空间科学学报, 2013, 33(3): 313-319 doi: 10.11728/cjss2013.03.313CUI W, ZHANG S Y, ZHANG S Y, et al. Research on optical autonomous navigation for approach phase of Mars exploration[J]. Chinese Journal of Space Science, 2013, 33(3): 313-319 doi: 10.11728/cjss2013.03.313 [15] WATANABE S I, TSUDA Y, YOSHIKAWA M, et al. Hayabusa2 mission overview[J]. Space Science Reviews, 2017, 208(1/2/3/4): 3-16 [16] RIZK B, D’AUBIGNY C D, GOLISH D, et al. OCAMS: the OSIRIS-REx camera suite[J]. Space Science Reviews, 2018, 214(1): 26 doi: 10.1007/s11214-017-0460-7 [17] KELLER H U, BARBIERI C, LAMY P, et al. OSIRIS–the scientific camera system onboard Rosetta[J]. Space Science Reviews, 2007, 128(1/2/3/4): 433-506 [18] SUN J, LI G R, WEN D S, et al. A sub-pixel centroid algorithm for star image based on Gaussian distribution[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, 2011, 53(182): 307-310 doi: 10.2322/tjsass.53.307 [19] HØG E, FABRICIUS C, MAKAROV V V, et al. The Tycho-2 catalogue of the 2.5 million brightest stars[J]. Astronomy and Astrophysics, 2000, 355(1): L27-L30 [20] ENRIGHT J, SINCLAIR D, GRANT C, et al. Towards star tracker only attitude estimation[C]//24th Annual AIAA/USU Conference on Small Satellites, Technical Session X, Logan, UT, USA, 9–12 August 2010; Volume 55. 2010 [21] PARK R S, FOLKNER W M, WILLIAMS J G, et al. The JPL planetary and lunar ephemerides DE440 and DE441[J]. The Astronomical Journal, 2021, 161(3): 105 doi: 10.3847/1538-3881/abd414 [22] 刘山洪, 鄢建国, 杨轩, 等. 水星探测器精密定轨软件研制及应用[J]. 武汉大学学报(信息科学版), 2019, 44(4): 510-517LIU S H, YAN J G, YANG X, et al. Development of mercury precise orbit determination software and application[J]. Geomatics and Information Science of Wuhan University, 2019, 44(4): 510-517 [23] TATSUMI E, KOUYAMA T, SUZUKI H, et al. Updated inflight calibration of Hayabusa2’s optical navigation camera (ONC) for scientific observations during the cruise phase[J]. Icarus, 2019, 325: 153-195 doi: 10.1016/j.icarus.2019.01.015 -
-

 下载:
下载:


计量
- 文章访问数: 1431
- HTML全文浏览量: 838
- PDF下载量: 96
-
被引次数:
0(来源:Crossref)
0(来源:其他)

