


基于序列凸优化的多目标规避方法
doi: 10.11728/cjss2026.01.2025-0048 cstr: 32142.14.cjss.2025-0048
-
 李克行 男, 1977年出生, 研究员, 研究方向为航天器导航制导与控制技术. E-mail: lkh345@126.com
李克行 男, 1977年出生, 研究员, 研究方向为航天器导航制导与控制技术. E-mail: lkh345@126.com -
 周敬博 男, 2000年出生, 硕士研究生, 研究方向为轨道动力学与空间安全防护. E-mail: zhoujingbo200005@126.com
周敬博 男, 2000年出生, 硕士研究生, 研究方向为轨道动力学与空间安全防护. E-mail: zhoujingbo200005@126.com
作者简介:
通讯作者:
Muti-object Collision Avoidance Method Based on Sequential Convex Optimization
-
摘要: 随着近地轨道航天器与空间碎片数量激增, 航天器同空间碎片发生的交会事件不断增多, 航天器可能同时面对多个碎片的碰撞威胁, 因此航天器需具备对多个空间碎片的规避能力. 针对多个空间碎片短期交会的情况, 以航天器推力约束与碰撞概率约束为依据, 提出了基于序列凸优化的多目标规避方法. 将连续推力控制问题转化为脉冲推力的规划问题, 进而将凸优化问题的目标函数与非线性约束进行凸化处理, 采用序列凸优化方法求解该规划问题. 在对多目标的规避问题上, 该方法既能有效降低航天器与空间碎片的碰撞风险, 又能保证较低的燃料消耗, 能够适用于低推力航天器长时间规避机动规划. 同时, 序列凸优化问题的求解速度较快, 可以满足自主计算的需求.Abstract: As the number of spacecraft and space debris in Near-Earth Orbit (NEO) increases, the number of encounters between spacecraft and space debris continues to rise. It is imperative that spacecraft are equipped with the capacity to evade multiple collisions with space debris, as they may face such threats concurrently. A multi-collision avoidance method based on sequential convex optimization, which is designed to achieve short-term rendezvous of multiple space debris objects while considering the constraints of spacecraft thrust and collision probability, has been proposed. First, the continuous thrust control problem is transformed into a planning problem for impulse thrust. Then the relative dynamics and constraints are convexified to solve the planning problem using the sequential convex optimization method. The proposed method has been demonstrated to be effective in reducing the risk of spacecraft collision with space debris in the avoidance problem for multiple targets. It can also carry out long-time avoidance maneuver planning for low-thrust spacecraft and ensure lower fuel consumption. Furthermore, the solution to the sequence convex optimization problem has been shown to have a fast solution speed, making it suitable for autonomous computation.
-
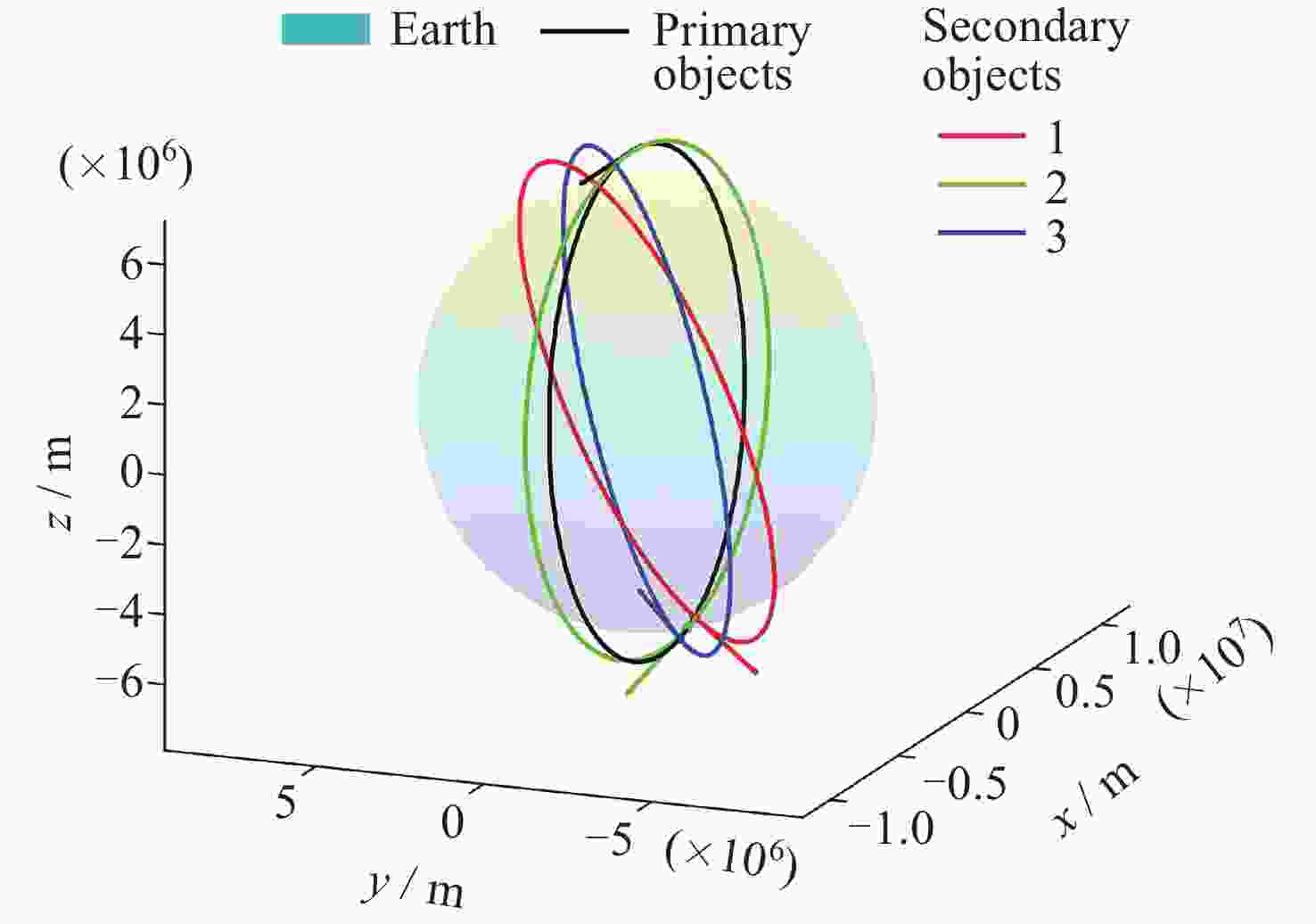
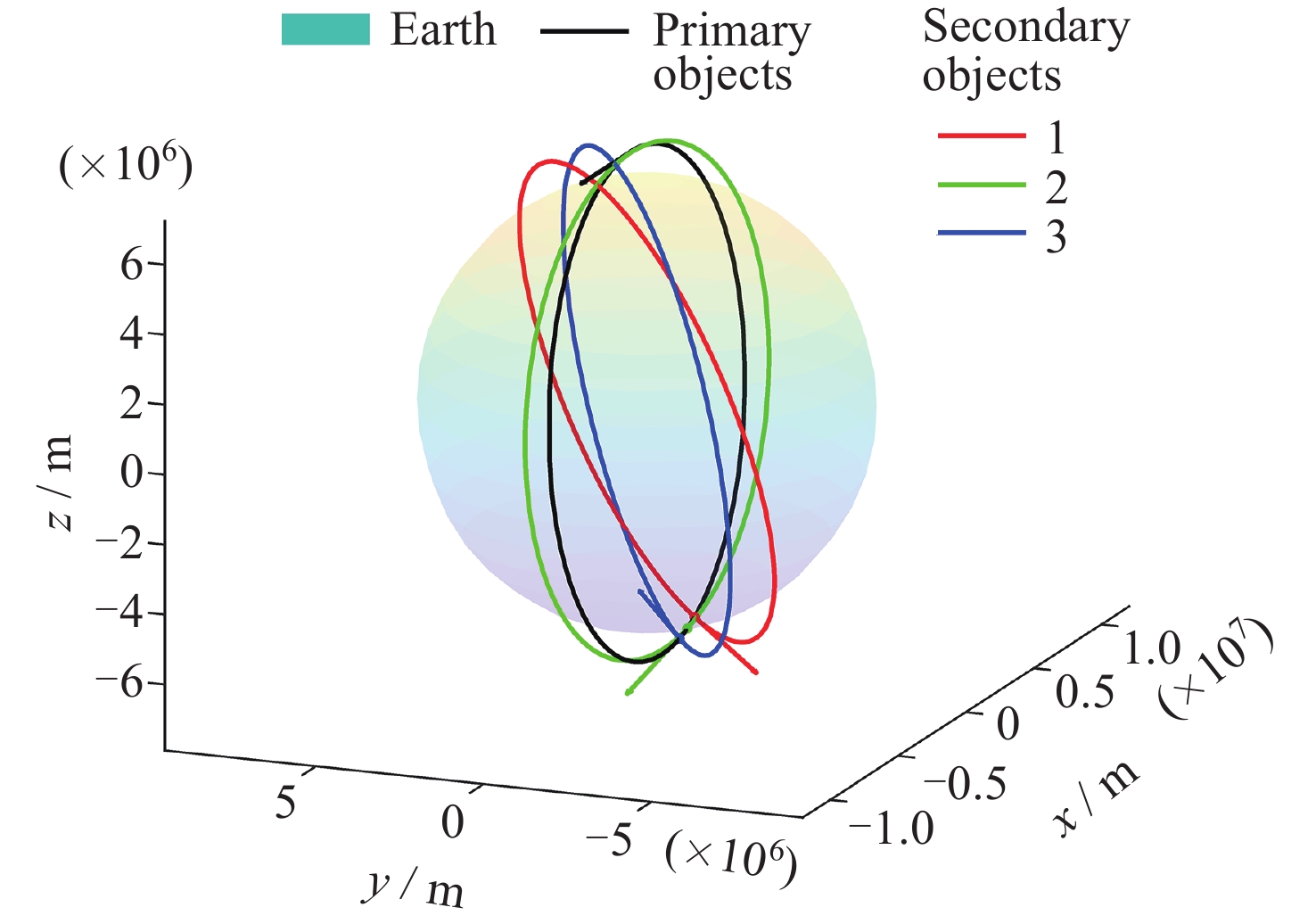
图 1 主要物体与次要物体初始轨道
Figure 1. Schematic diagram of initial orbit of primary and secondary objects

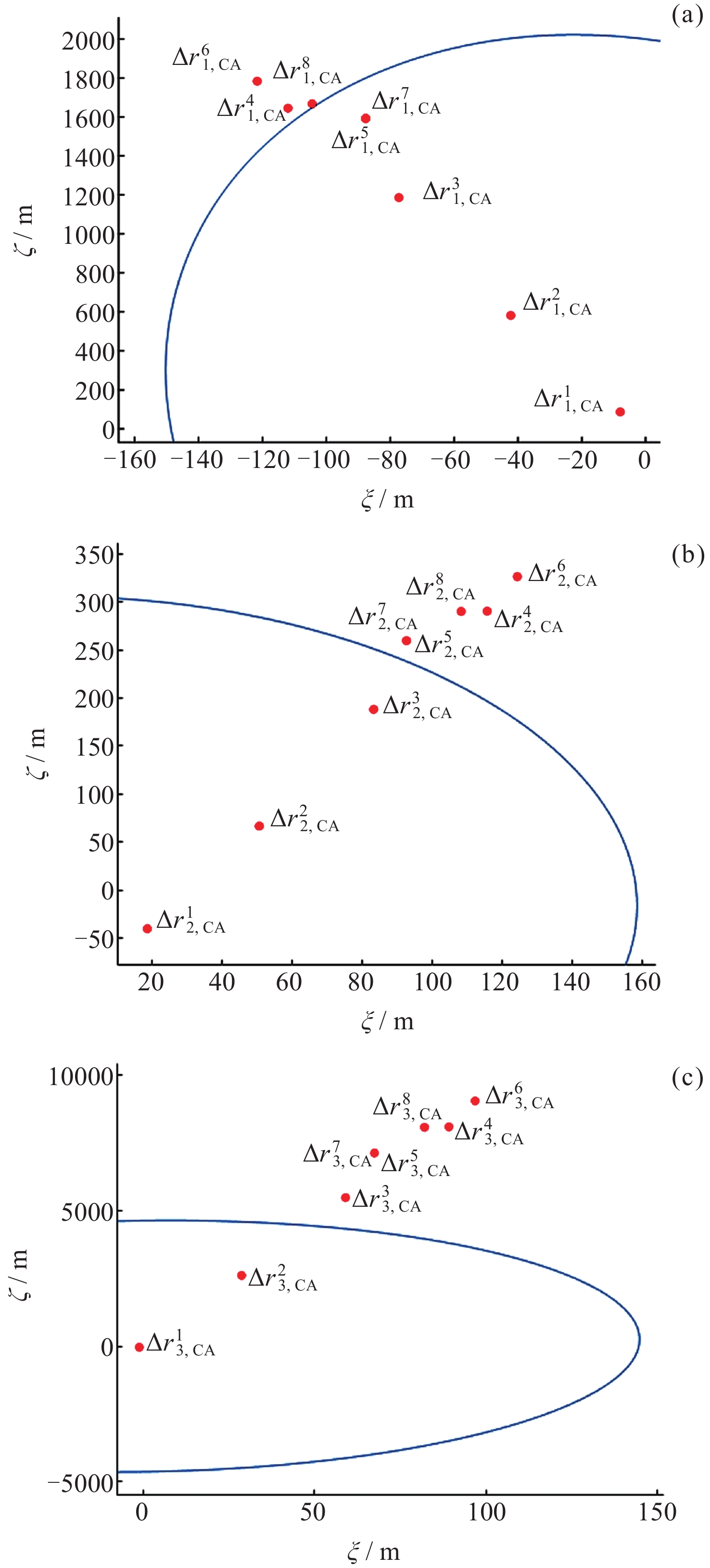
图 2 主要物体与次要物体在b平面上的相对位置矢量
Figure 2. Relative position vectors of primary and secondary objects in the b-plane
表 1 主要物体初始时刻轨道根数
Table 1. Orbital elements at the initial moment of primary objects
$ a $/km $ e $ $ i $/(º) Ω/(º) $ \omega $/(º) $ {f}_{0} $/(º) 7158 $ {0.00145} $ $ \text{86.4} $ $ \text{0} $ $ \text{0} $ $ \text{90} $  下载: 导出CSV
下载: 导出CSV
表 2 主要物体与次要物体交会信息
Table 2. Conjunction message of primary and secondary objects
次要物体1 次要物体2 次要物体3 相对位置/m $ \left[ \begin{array}{c}{-7.926}\\\text{34.994}\\\text{80.000}\end{array} \right] $ $ \left[ \begin{array}{c}{-16.800}\\{-1.797}\\\text{41.000}\end{array} \right] $ $ \left[ \begin{array}{c}\text{0.918}\\{-35.199}\\{-3.000}\end{array} \right] $ 相对速度/
(m·s–1)$ \left[ \begin{array}{c}\text{14.965}\\{-12\;552.592}\\{5\;489.000}\end{array} \right] $ $ \left[ \begin{array}{c}{-40.559}\\{-14\;910.793}\\{-785.500}\end{array} \right] $ $ \left[ \begin{array}{c}\text{1.422}\\{-1\;585.999}\\{-4\;653.000}\end{array} \right] $ 最近距离/m $ \text{87.678} $ $ \text{44.345} $ $ \text{35.339} $ 最近时刻/h $ \text{16} $ $ 2\text{1} $ $ \text{26} $ 碰撞概率 $ {0.037\;728} $ $ {0.175\;97} $ $ {0.016\;782} $
下载: 导出CSV
表 3 主要物体与次要物体协方差
Table 3. Covariance of primary and secondary objects
主要物体协方差/$ \mathrm{km}^2 $ $ {9.31700905887535}\times {{10}}^{-5} $ $ {-2.623398113500550}\times {{10}}^{-4} $ $ {2.360382173935300}\times {{10}}^{-5} $ $ {-2.623398113500550}\times {{10}}^{-4} $ $ {1.77796454279511}\times {{10}}^{-2} $ $ {-9.331225387386501}\times {{10}}^{-5} $ $ {2.360382173935300}\times {{10}}^{-5} $ $ {-9.331225387386501}\times {{10}}^{-5} $ $ {1.917372231880040}\times {{10}}^{-5} $ 次要物体协方差/$ \mathrm{km}^2 $ $ {6.346570910720371}\times {{10}}^{-4} $ $ {-1.962292216245289}\times {{10}}^{-3} $ $ {7.077413655227660}\times {{10}}^{-5} $ $ {-1.962292216245289}\times {{10}}^{-3} $ $ {8.199899363150306}\times {{10}}^{-1} $ $ {1.139823810584350}\times {{10}}^{-3} $ $ {7.077413655227660}\times {{10}}^{-5} $ $ {1.139823810584350}\times {{10}}^{-3} $ $ {2.510340829074070}\times {{10}}^{-4} $
下载: 导出CSV
算法1 序列凸化算法 输入CDM信息: $ \boldsymbol{x}'_{\text{p,CA}},\boldsymbol{x}'_{{\text{s}}_{l},\text{CA}} $,$ \boldsymbol{\varSigma }'_{\text{p,RTN}},\boldsymbol{\varSigma }'_{{\text{s}}_{l},\text{RTN}} $,$ t'_{l,\text{CA}} $,$ {R}_{\text{HBR}} $ 指定: $ {t}_{0} $,$ \Delta t $,$ {t}_{\text{end}} $,$ N $,$ \Delta {v}_{\max } $,$ {P}_{\max } $,$ to{l}_{\text{m}} $,$ to{l}_{\text{M}} $ 反向从$ t'_{\text{CA}} $推广到$ {t}_{0} $, 获得$ \boldsymbol{x}'_{\text{p}}\left(0\right),\boldsymbol{x}'_{{\text{s}}_{l}}\left(0\right) $,$ \boldsymbol{\varSigma }'_{\text{p,ECI}}\left(0\right),\boldsymbol{\varSigma }'_{{\text{s}}_{l},\text{ECI}}\left(0\right) $ 分段时间: $ {t}_{0}\colon \Delta t\colon {t}_{\text{end}} $ $ j\leftarrow 0,{\boldsymbol{X}}^{0}\leftarrow ,t_{{l},\text{CA}}^{0}\leftarrow t'_{l,\text{CA}},\Delta \boldsymbol{r}_{l,\text{CA}}^{1,0}\leftarrow \Delta \boldsymbol{r}'_{l,\text{CA}},\boldsymbol{\varSigma }_{l,b2}^{0}\leftarrow \boldsymbol{\varSigma }'_{l,b2} $ while $ \left(j=0\right)\text{or}{\left|\left|{\boldsymbol{X}}^{j}-{\boldsymbol{X}}^{j-1}\right|\right|}_{\mathrm{\infty }}\geq {e}_{\text{M}} $ $ j\leftarrow j+1 $ 使用$ {\boldsymbol{X}}^{j-1} $作为输入, 解微分方程(6)获得参考轨迹 通过式(45)、式(48)、式(54)更新$ N_{l,\text{CA}}^{j},t_{l,\text{CA}}^{j},\Delta \boldsymbol{r}_{l,\text{CA}}^{j},\boldsymbol{B}_{l,\text{CA}}^{j}, $ $ \boldsymbol{\varSigma }_{{l},b2}^{j},d_{l,\text{CA},\max }^{j} $ $ k\leftarrow 0,\Delta \boldsymbol{r}_{\text{CA}}^{j,0}\leftarrow \Delta \boldsymbol{r}_{\text{CA}}^{j} $ while $ \left(k=0\right)\text{or}\underset{l=1\cdots M}{\text{max}}\left({\left|\left|\Delta \boldsymbol{r}_{l,\text{CA}}^{j,k}-\Delta \boldsymbol{r}_{l,\text{CA}}^{j,k-1}\right|\right|}_{2}\right)\geq {e}_{\text{m}} $ $ k\leftarrow k+1 $ 解$ M $个子凸优化问题式(42)得到$ \boldsymbol{z}_l^k $ 解机动规划凸优化问题式(55)得到$ {\boldsymbol{X}}^{j,k} $ $ \Delta \boldsymbol{r}_{l,\text{CA}}^{j,k}\leftarrow \Delta \boldsymbol{r}_{l,\text{CA}}^{j,k-1}+\boldsymbol{B}_{l,\text{CA}}^{j}\left({\boldsymbol{X}}^{j,k}-{\boldsymbol{X}}^{j,k-1}\right) $ end while $ {\boldsymbol{X}}^{j}\leftarrow {\boldsymbol{X}}^{j,k} $ end while
下载: 导出CSV
-
[1] 王建峰, 刘静, 刘林. 规避时段选择与机动变轨研究[J]. 空间科学学报, 2009, 29(2): 234-239WANG Jianfeng, LIU Jing, LIU Lin. Research of the evadible period and satellite orbit maneuver[J]. Chinese Journal of Space Science, 2009, 29(2): 234-239 [2] 胡敏, 曾国强. 编队卫星碰撞规避方法研究[J]. 上海航天, 2010, 27(3): 6-9,53 doi: 10.3321/j.issn:1000-758X.2009.05.011HU Min, ZENG Guoqiang. Research on methods of collision avoidance for formation flying satellites[J]. Aerospace Shanghai, 2010, 27(3): 6-9,53 doi: 10.3321/j.issn:1000-758X.2009.05.011 [3] LEE K, PARK C, PARK S Y. Near-optimal guidance and control for spacecraft collision avoidance maneuvers[C]//AIAA/AAS Astrodynamics Specialist Conference. San Diego: AIAA, 2014: 4114 [4] SALEMME G, ARMELLIN R, DI LIZIA P. Continuous-thrust collision avoidance manoeuvres optimization[C]//AIAA Scitech 2020 Forum. Orlando: AIAA, 2020: 0231 [5] KELLY B, DE PICCIOTTO S. Probability based optimal collision avoidance maneuvers[C]//Space 2005. Long Beach: AIAA, 2005: 6775 [6] WU Baolin, WANG Danwei, POH E K, et al. Nonlinear optimization of low-thrust trajectory for satellite formation: Legendre pseudospectral approach[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(4): 1371-1381 doi: 10.2514/1.37675 [7] RICHARDS A, SCHOUWENAARS T, HOW J P, et al. Spacecraft trajectory planning with avoidance constraints using mixed-integer linear programming[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(4): 755-764 doi: 10.2514/2.4943 [8] MUELLER J. Onboard planning of collision avoidance maneuvers using robust optimization[C]//AIAA Infotech@Aerospace Conference. Seattle: AIAA, 2009: 2051 [9] MUELLER J B, GRIESEMER P R, THOMAS S J. Avoidance maneuver planning incorporating station-keeping constraints and automatic relaxation[J]. Journal of Aerospace Information Systems, 2013, 10(6): 306-322 doi: 10.2514/1.54971 [10] BOMBARDELLI C. Analytical formulation of impulsive collision avoidance dynamics[J]. Celestial Mechanics and Dynamical Astronomy, 2014, 118(2): 99-114 doi: 10.1007/s10569-013-9526-3 [11] BOMBARDELLI C, HERNANDO-AYUSO J. Optimal impulsive collision avoidance in low earth orbit[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(2): 217-225 doi: 10.2514/1.G000742 [12] GONZALO J L, COLOMBO C, LIZIA P D. Analytical framework for space debris collision avoidance maneuver design[J]. Journal of Guidance, Control, and Dynamics, 2021, 44(3): 469-487 doi: 10.2514/1.G005398 [13] VASILE M, COLOMBO C. Optimal impact strategies for asteroid deflection[J]. Journal of guidance, control, and dynamics, 2008, 31(4): 858-872 doi: 10.2514/1.33432 [14] ARMELLIN R. Collision avoidance maneuver optimization with a multiple-impulse convex formulation[J]. Acta Astronautica, 2021, 186: 347-362 doi: 10.1016/j.actaastro.2021.05.046 [15] MASSON M, ARZELIER D, JOLDES M, et al. Multi-maneuver algorithms for multi-risk collision avoidance via nonconvex quadratic optimization[J]. IFAC-PapersOnLine, 2023, 56(2): 1995-2000 doi: 10.1016/j.ifacol.2023.10.1094 [16] BOYD S, VANDENBERGHE L. Convex Optimization[M]. Cambridge: Cambridge University Press, 2004 [17] AKELLA M R, ALFRIEND K T. Probability of collision between space objects[J]. Journal of Guidance, Control, and Dynamics, 2000, 23(5): 769-772 doi: 10.2514/2.4611 [18] LIU Xinfu, LU Ping. Solving nonconvex optimal control problems by convex optimization[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(3): 750-765 doi: 10.2514/1.62110 -
-

 下载:
下载:

计量
- 文章访问数: 655
- HTML全文浏览量: 300
- PDF下载量: 82
-
被引次数:
0(来源:Crossref)
0(来源:其他)

