LU Wenqiang,
XU Na,
CHEN Ran,
MENG Xiangguang,
LIAO Mi,
LIU Yan,
TANG Qi,
CHENG Yan,
YANG Guanglin,
HU Xiuqing,
ZHAO Xiangang,
SUN Yueqiang
Abstract:
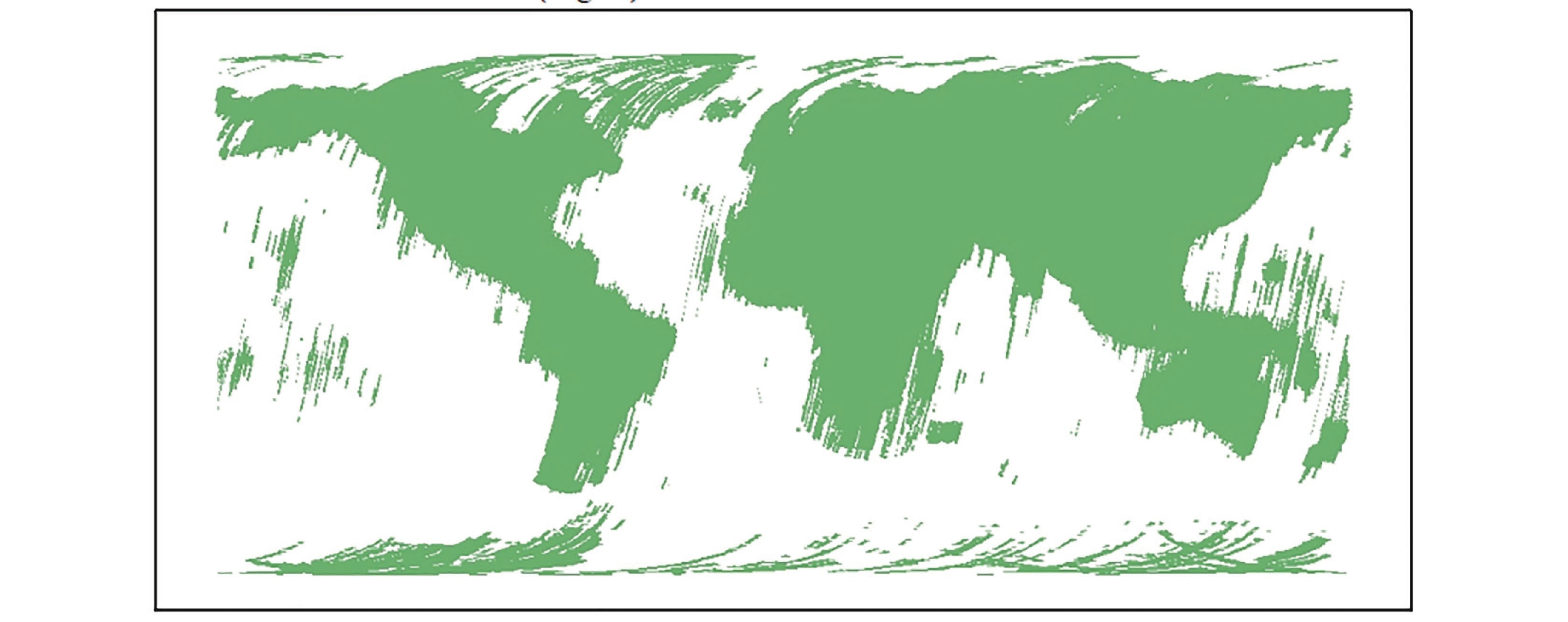
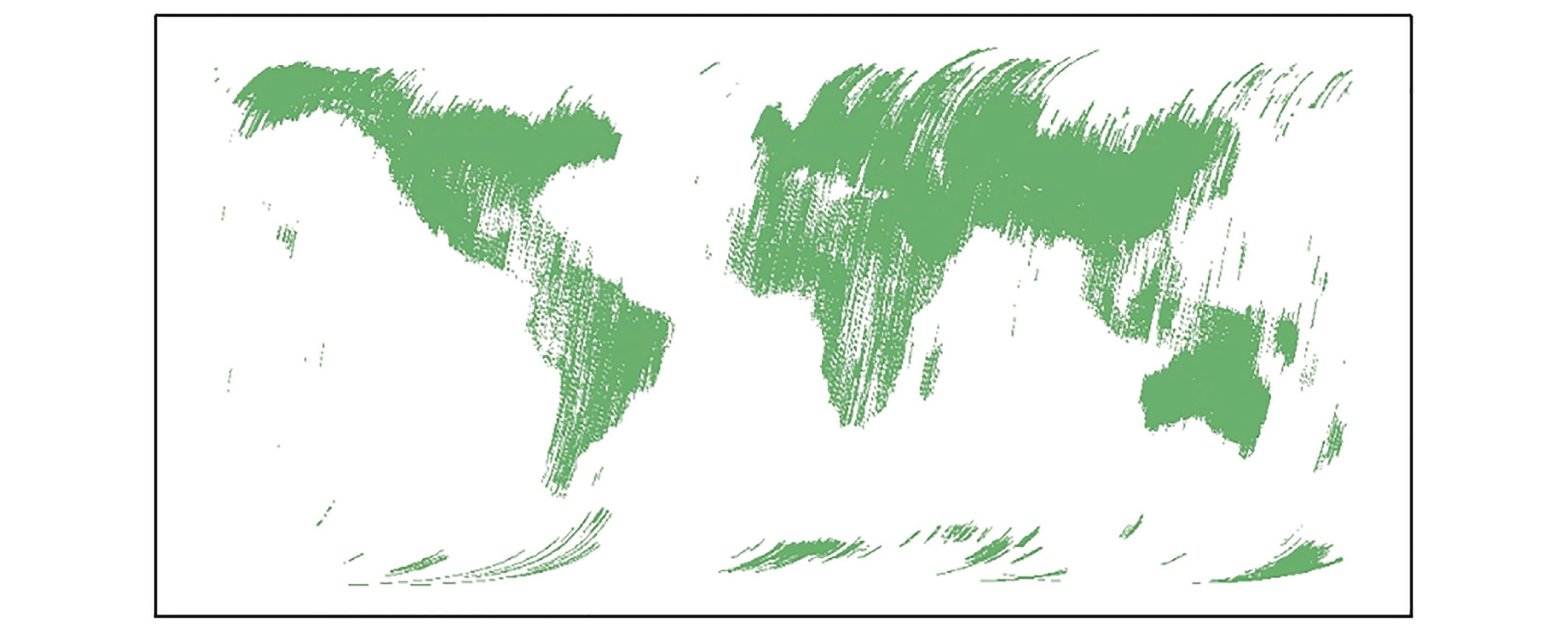
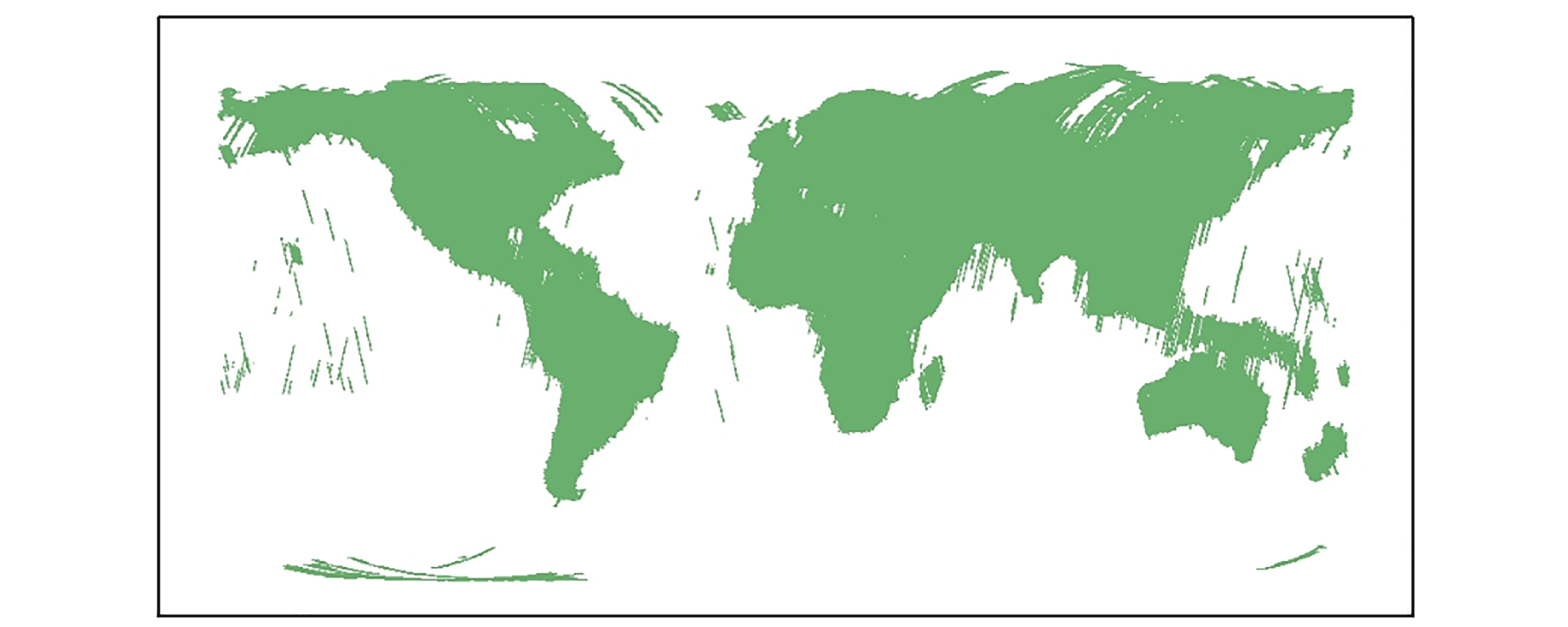
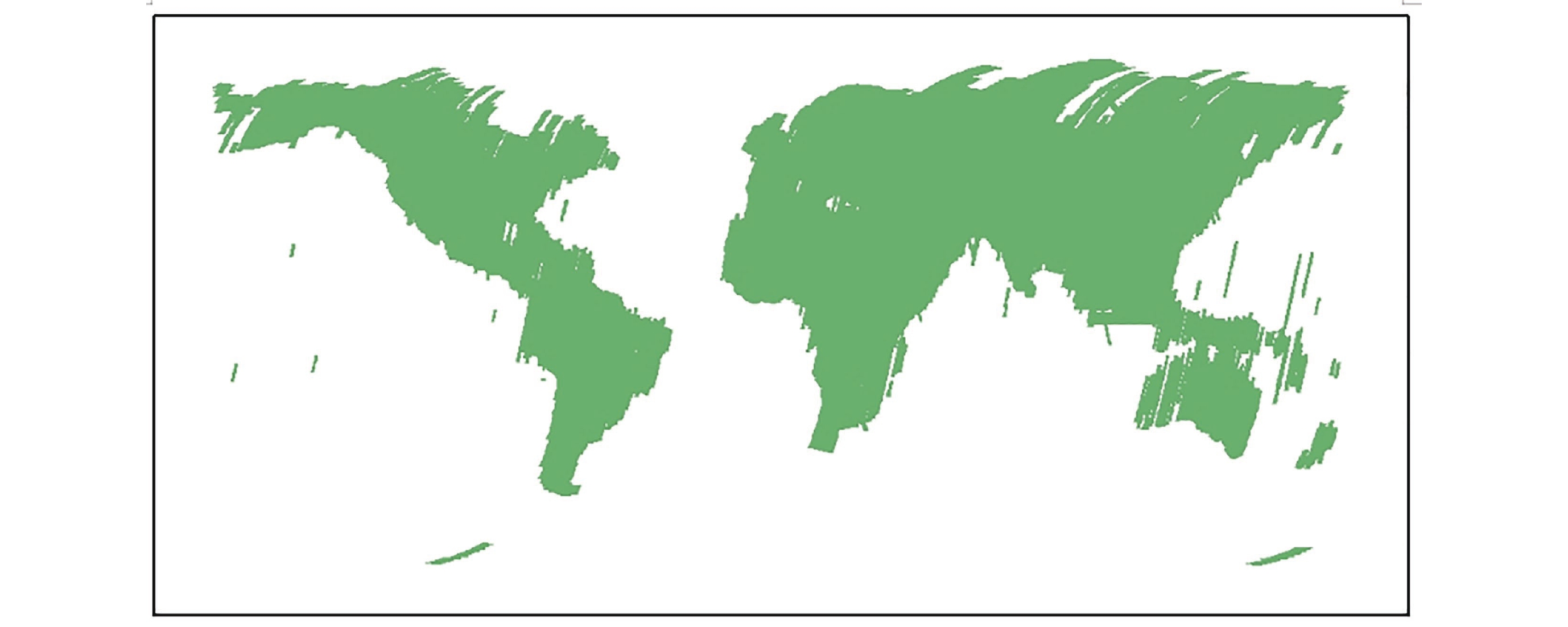
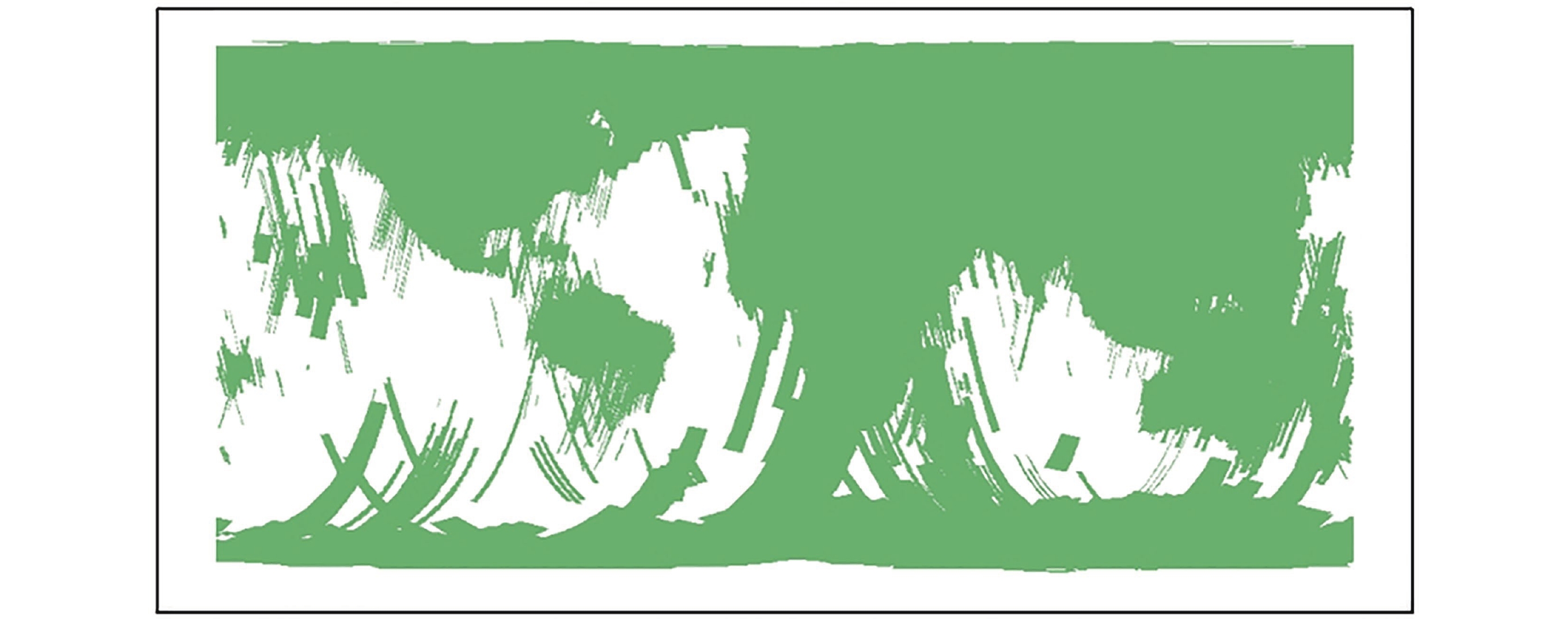
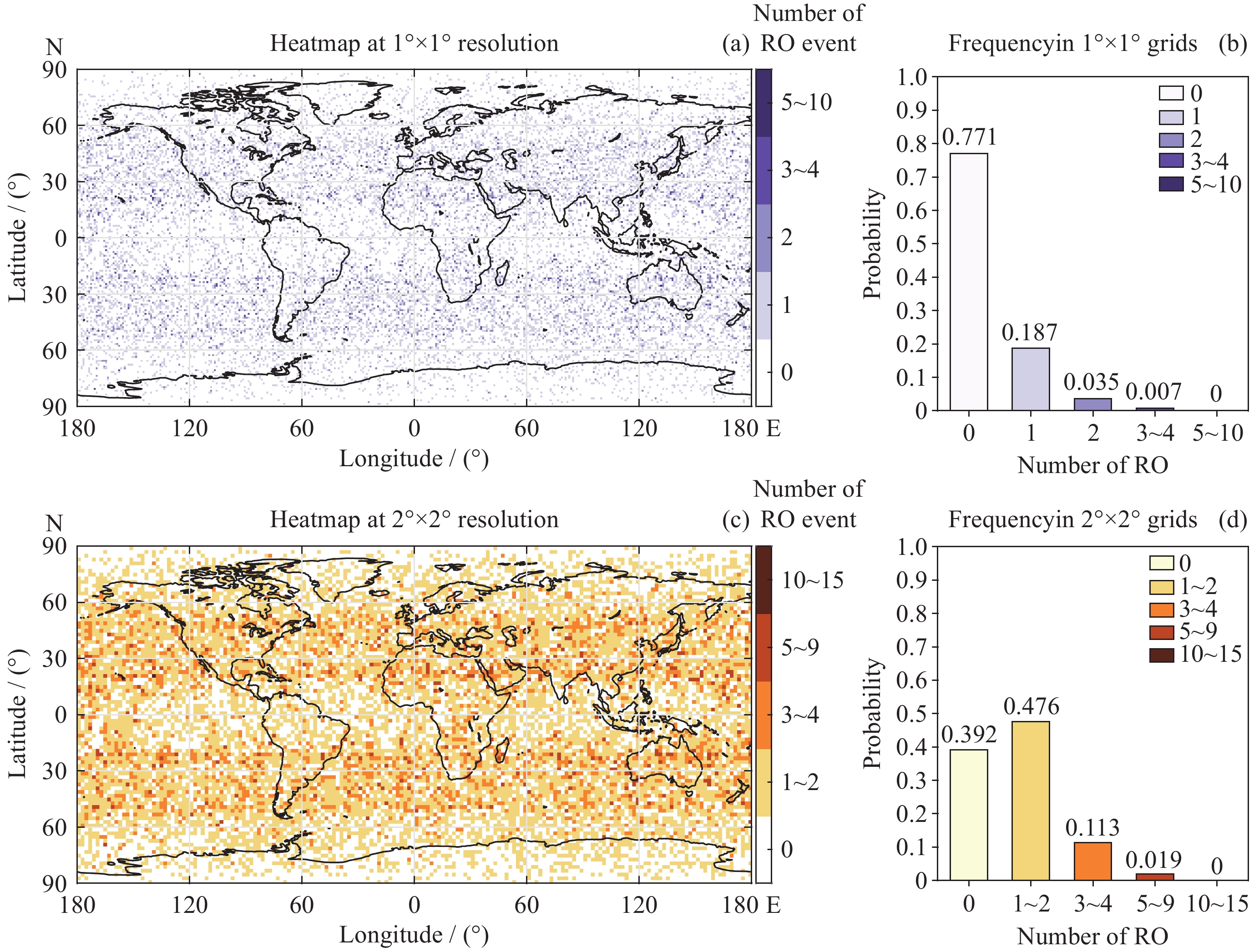
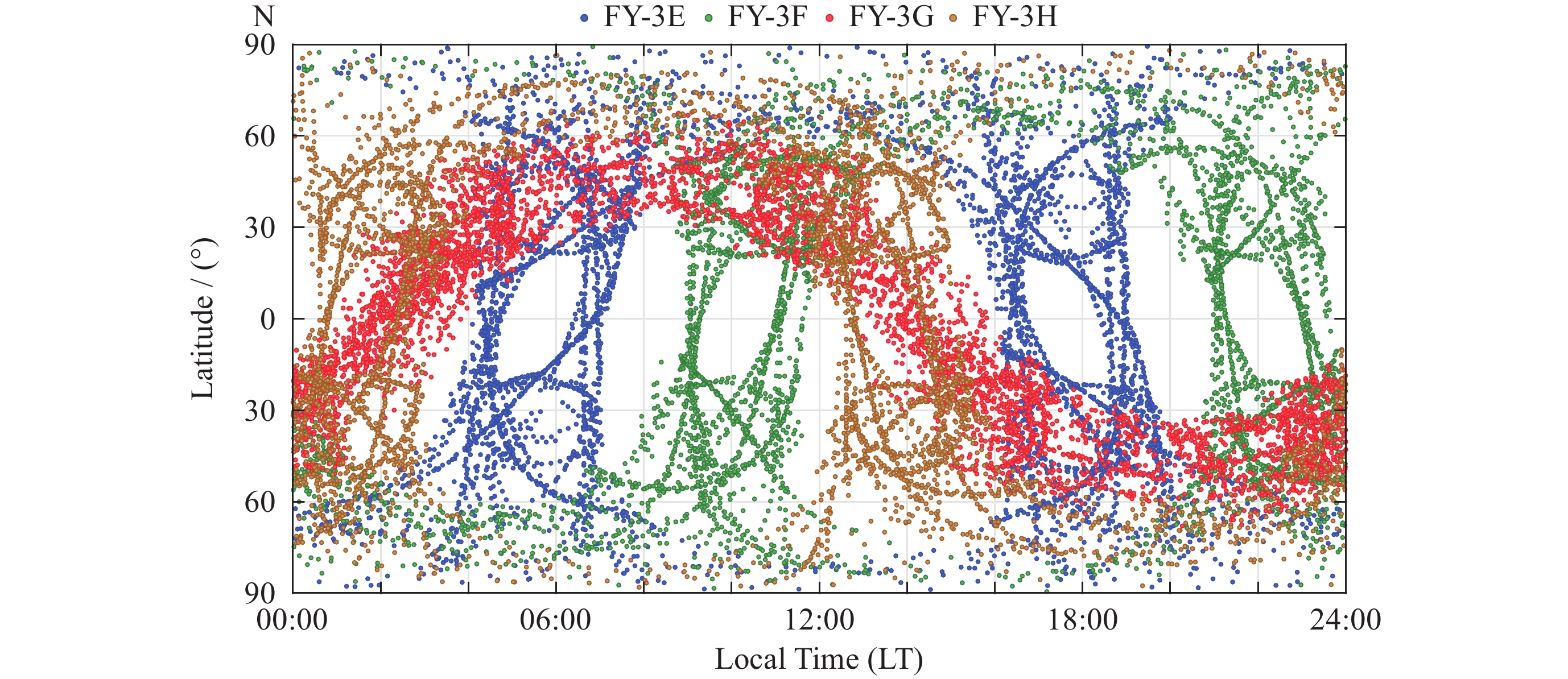
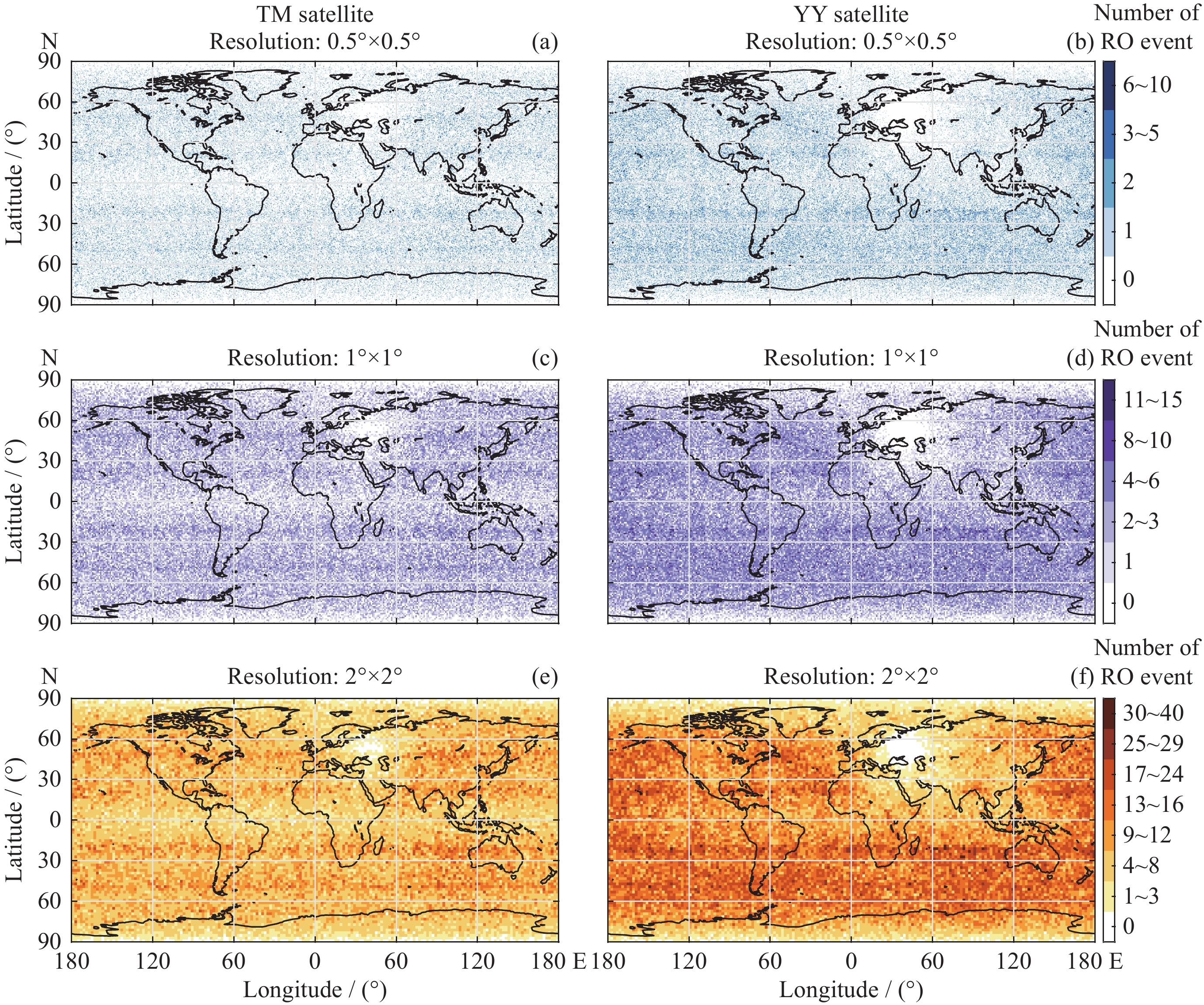
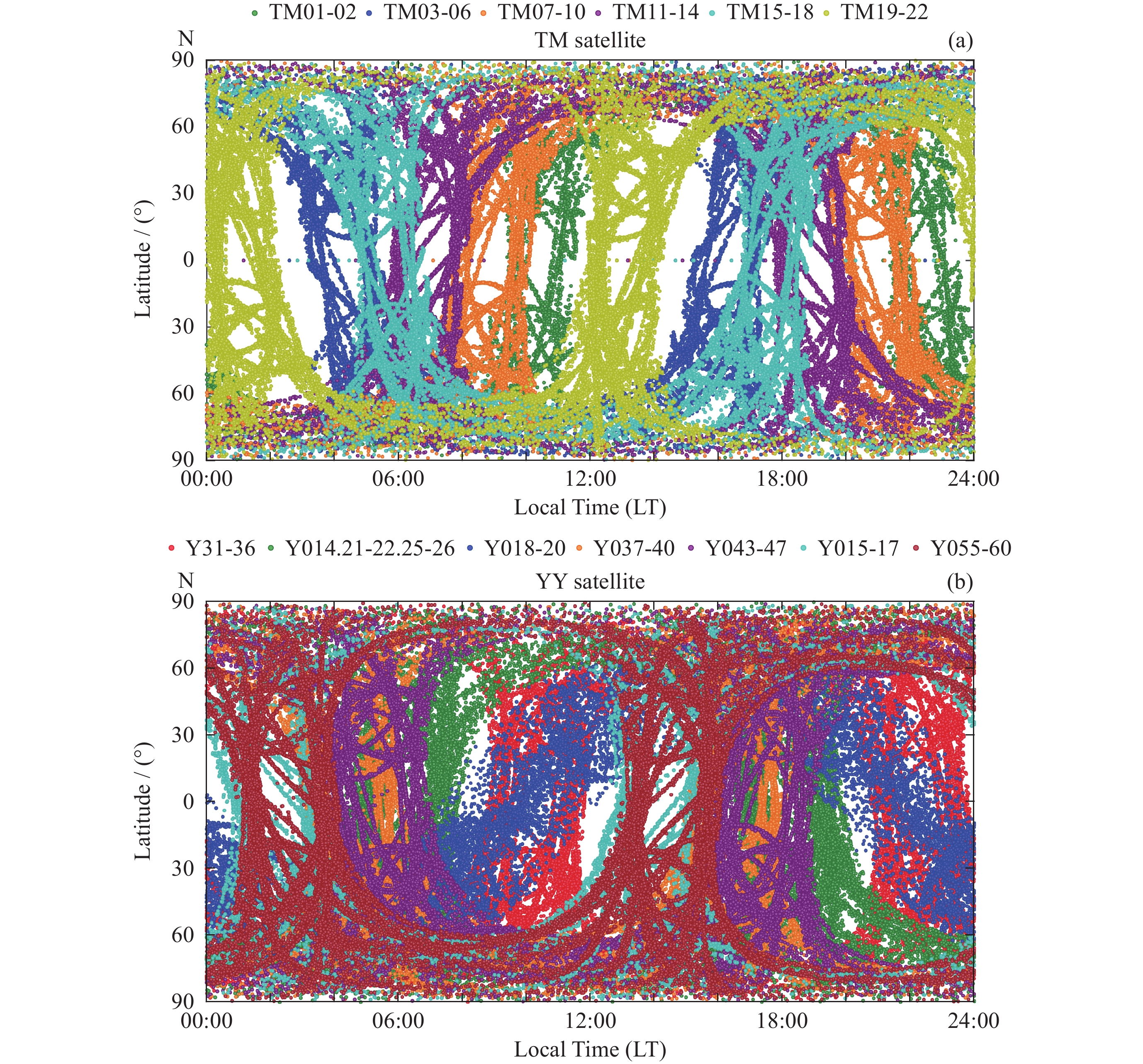
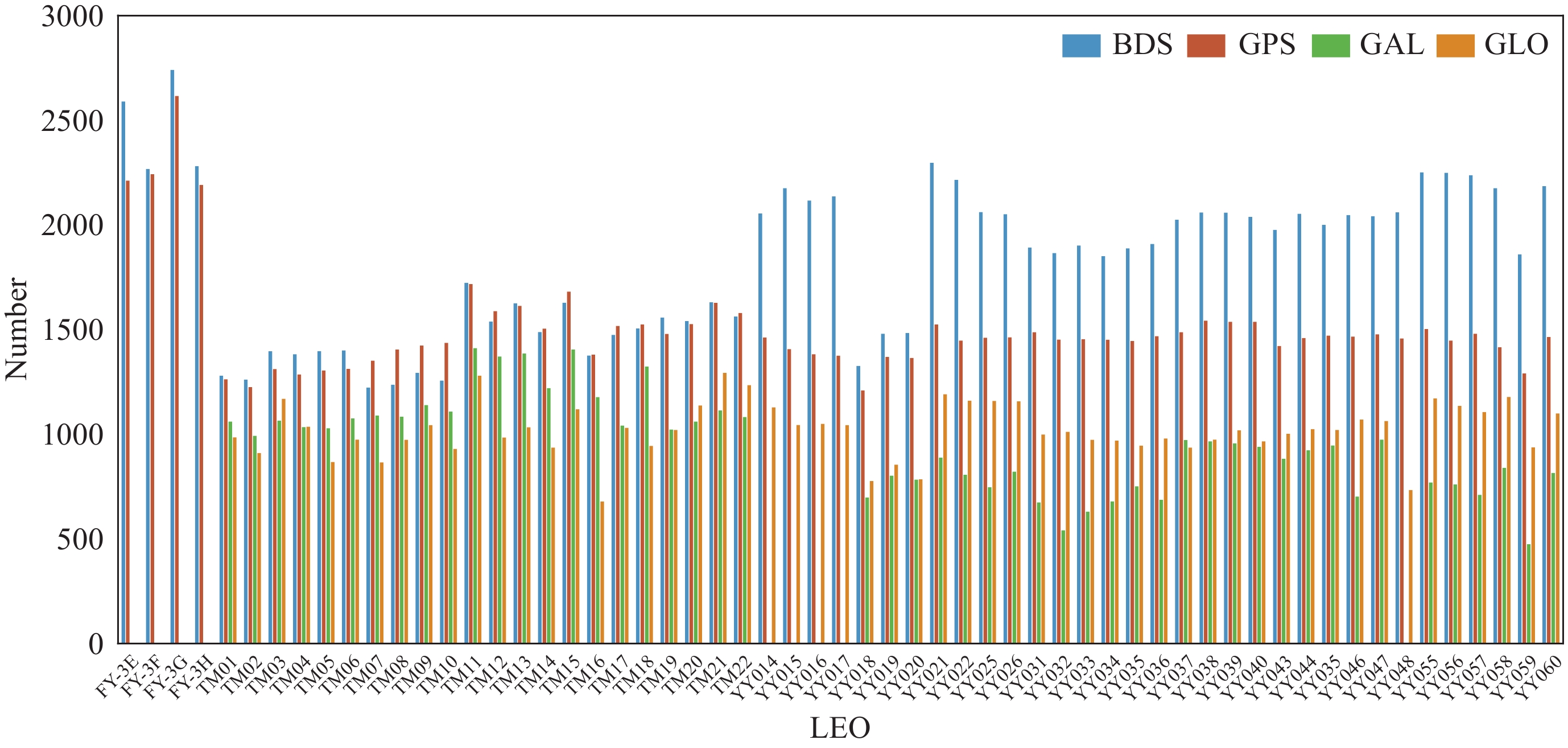
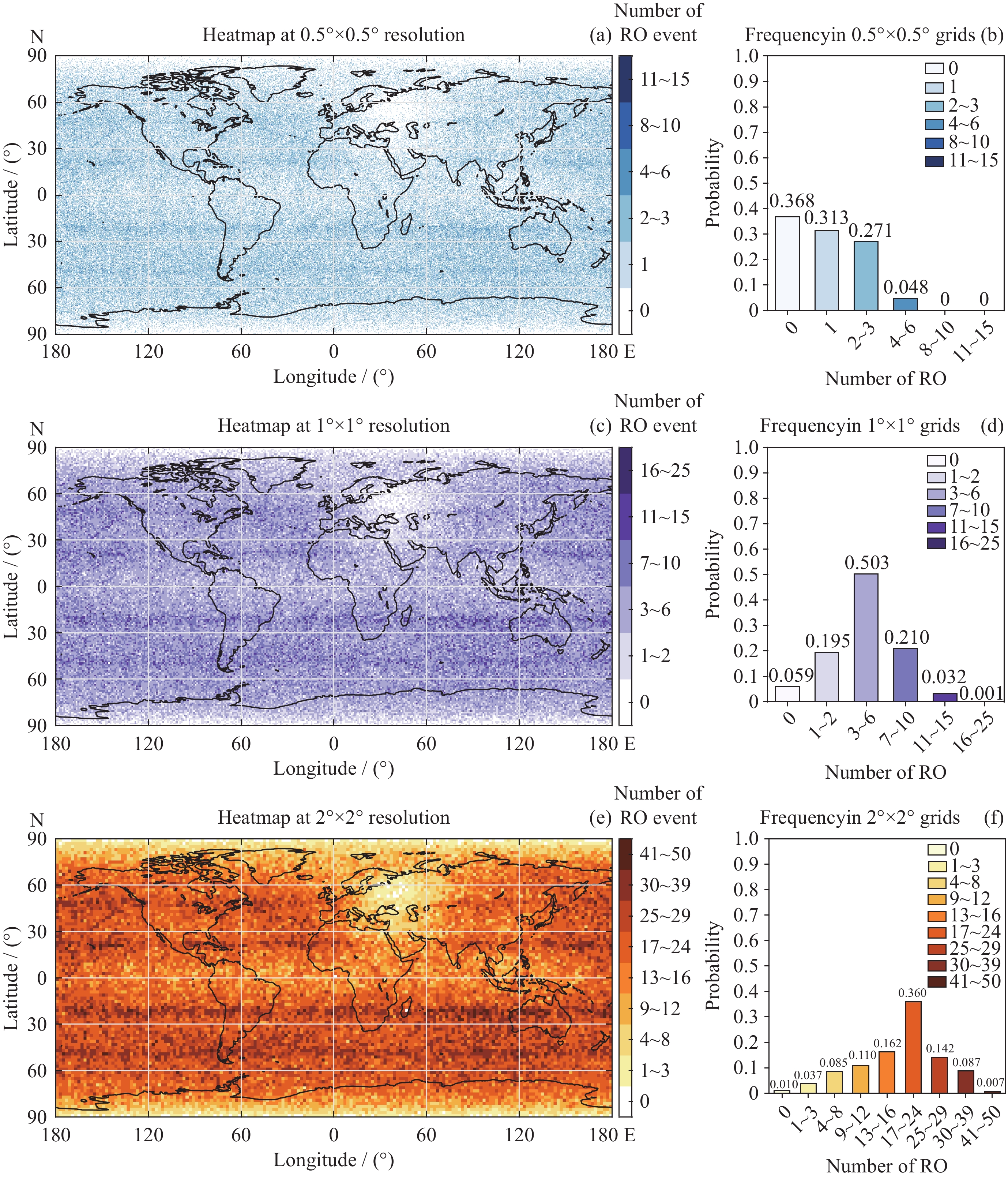
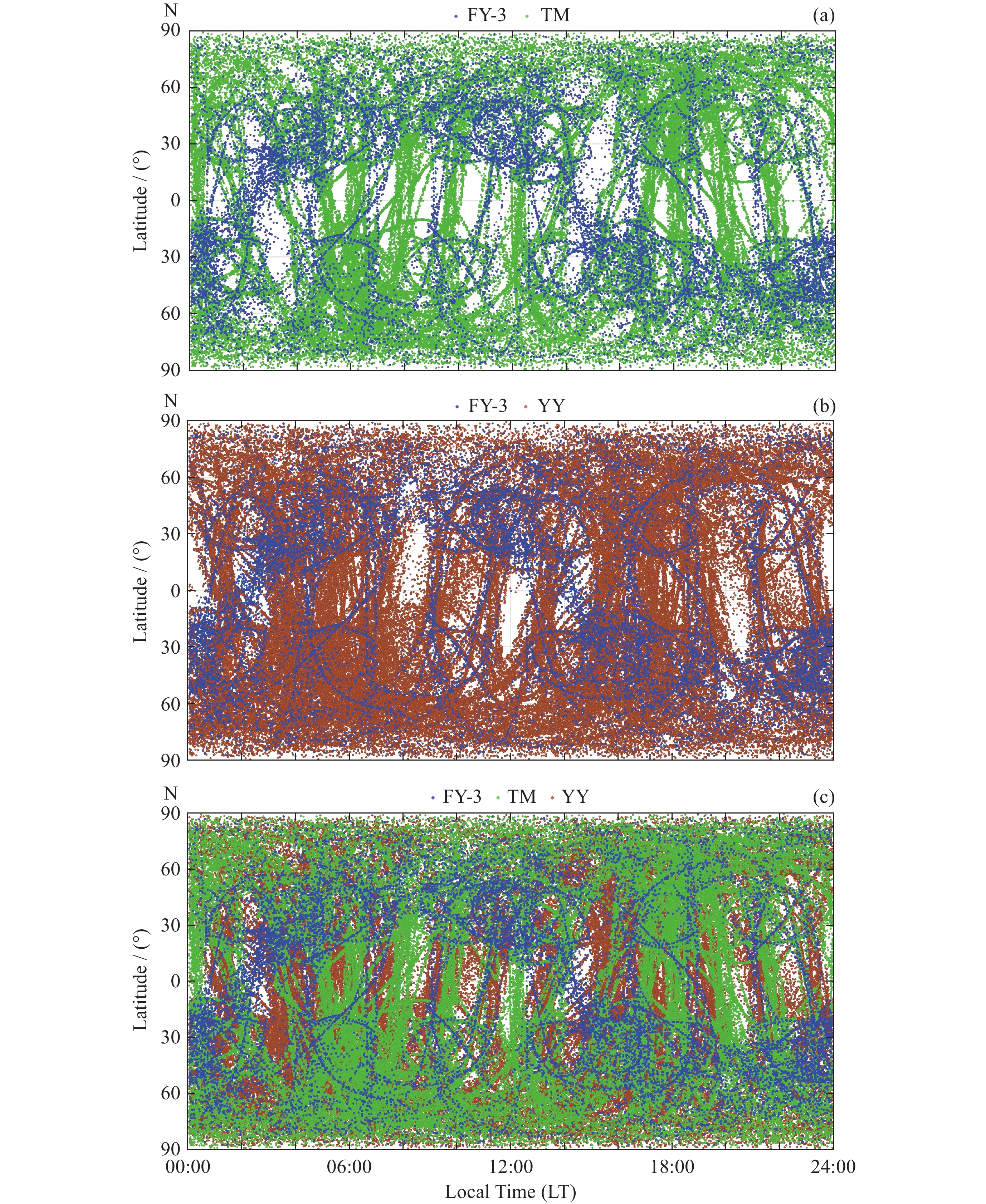
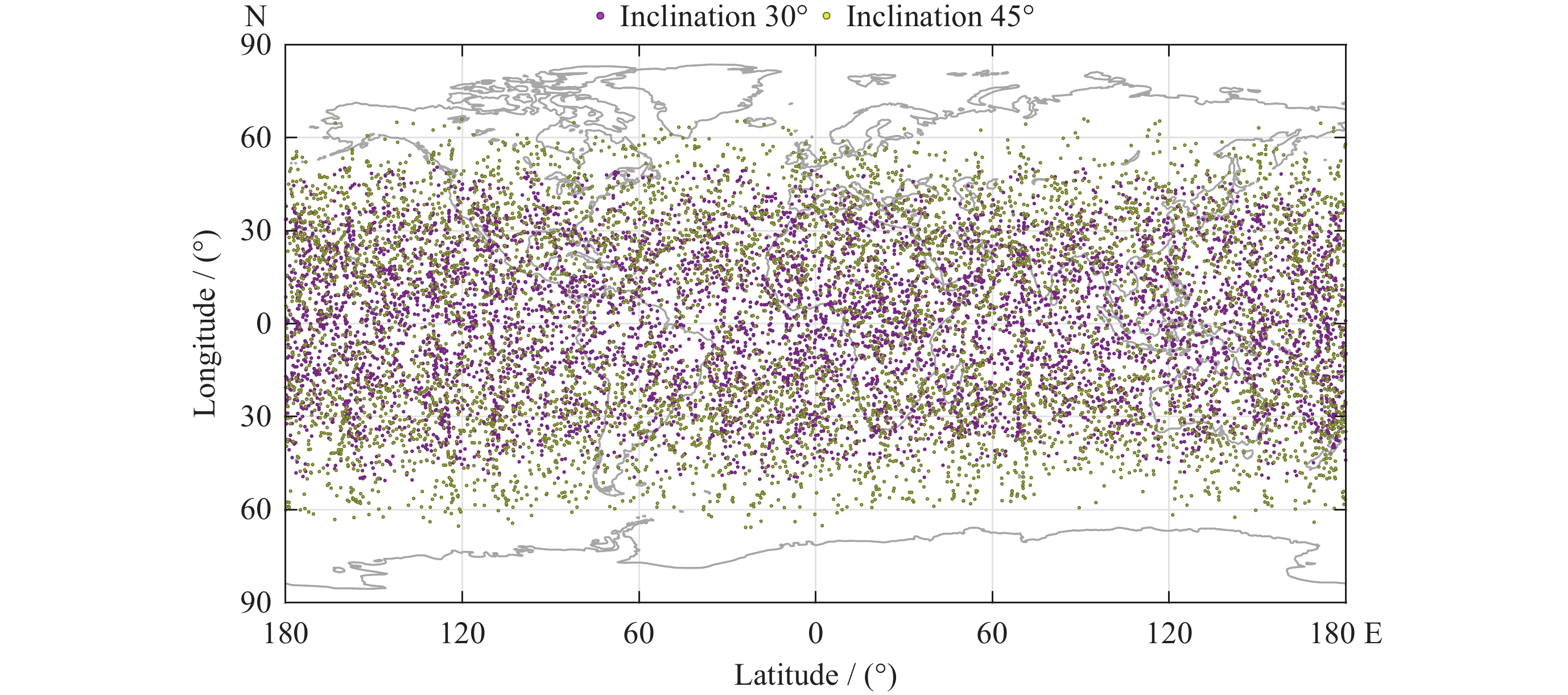
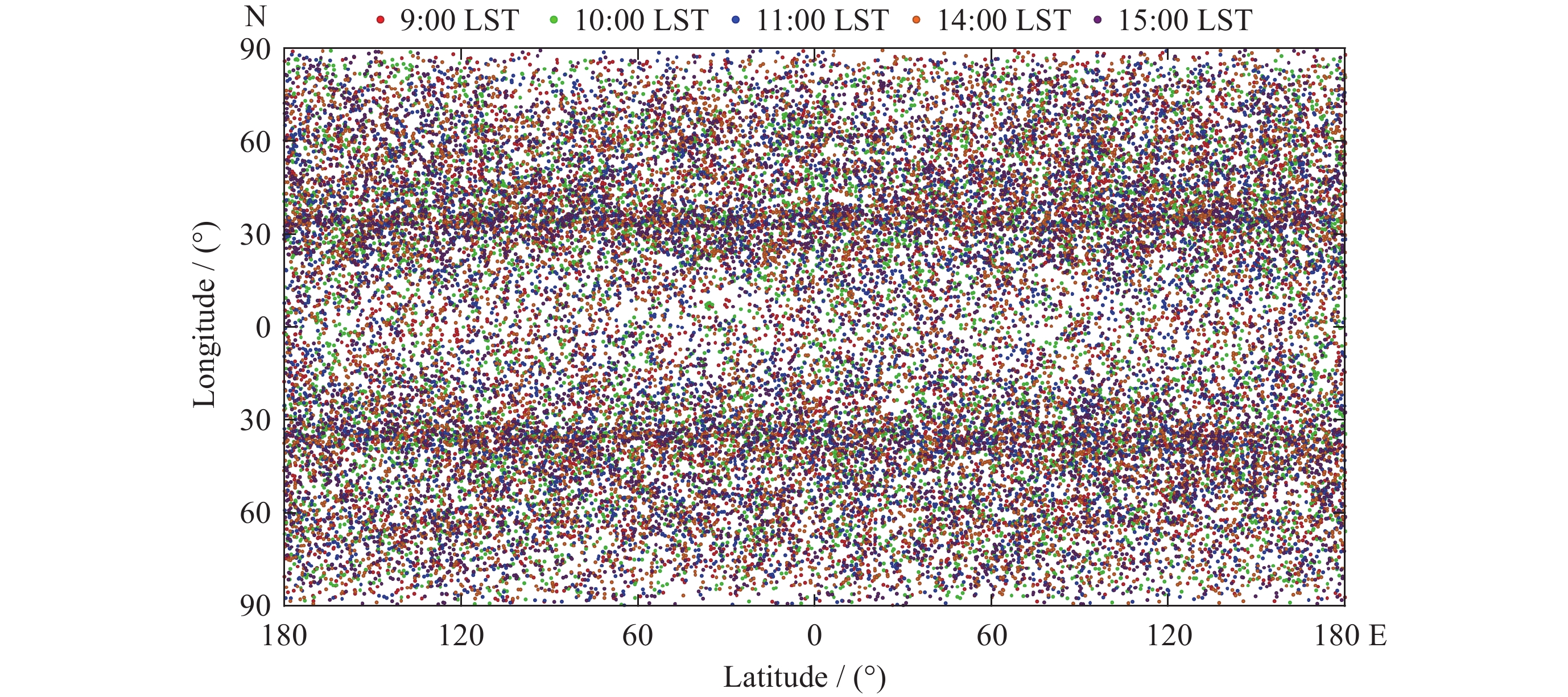
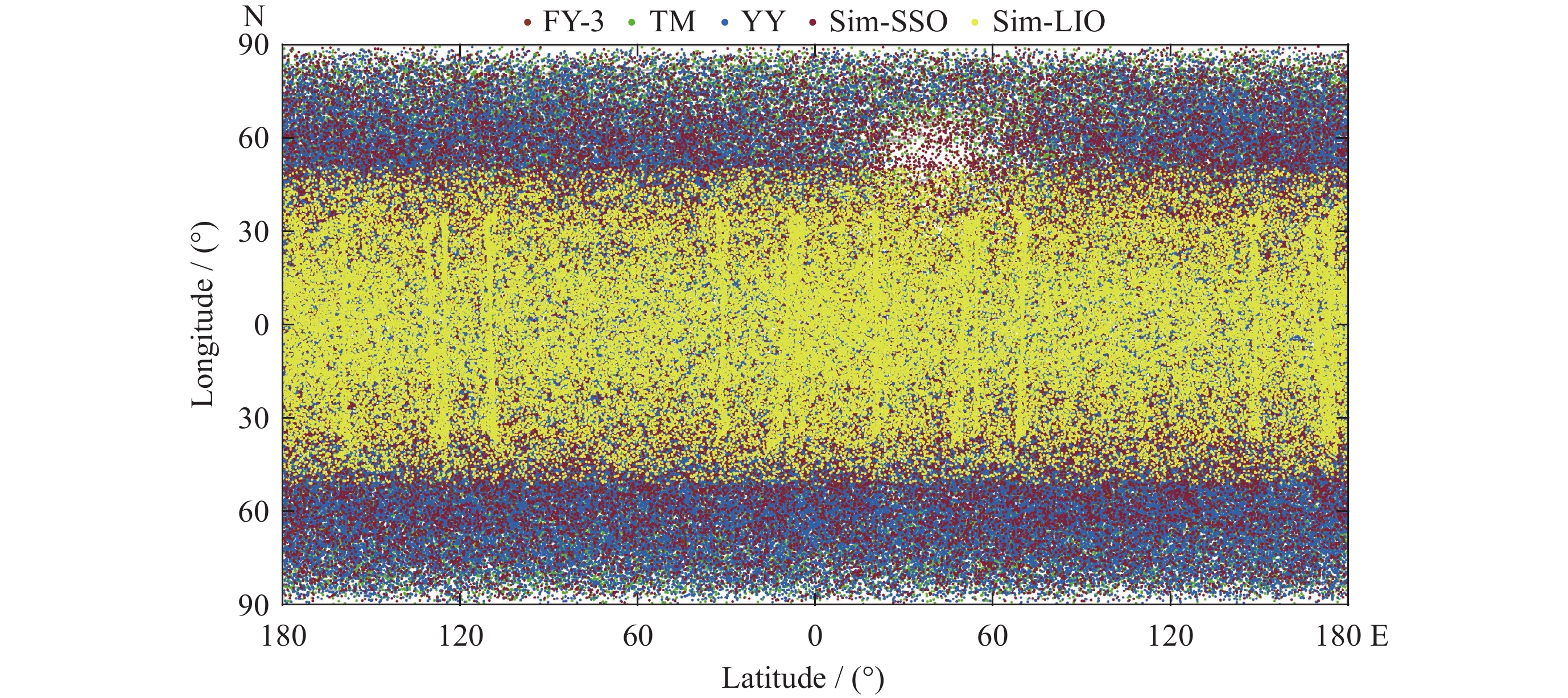
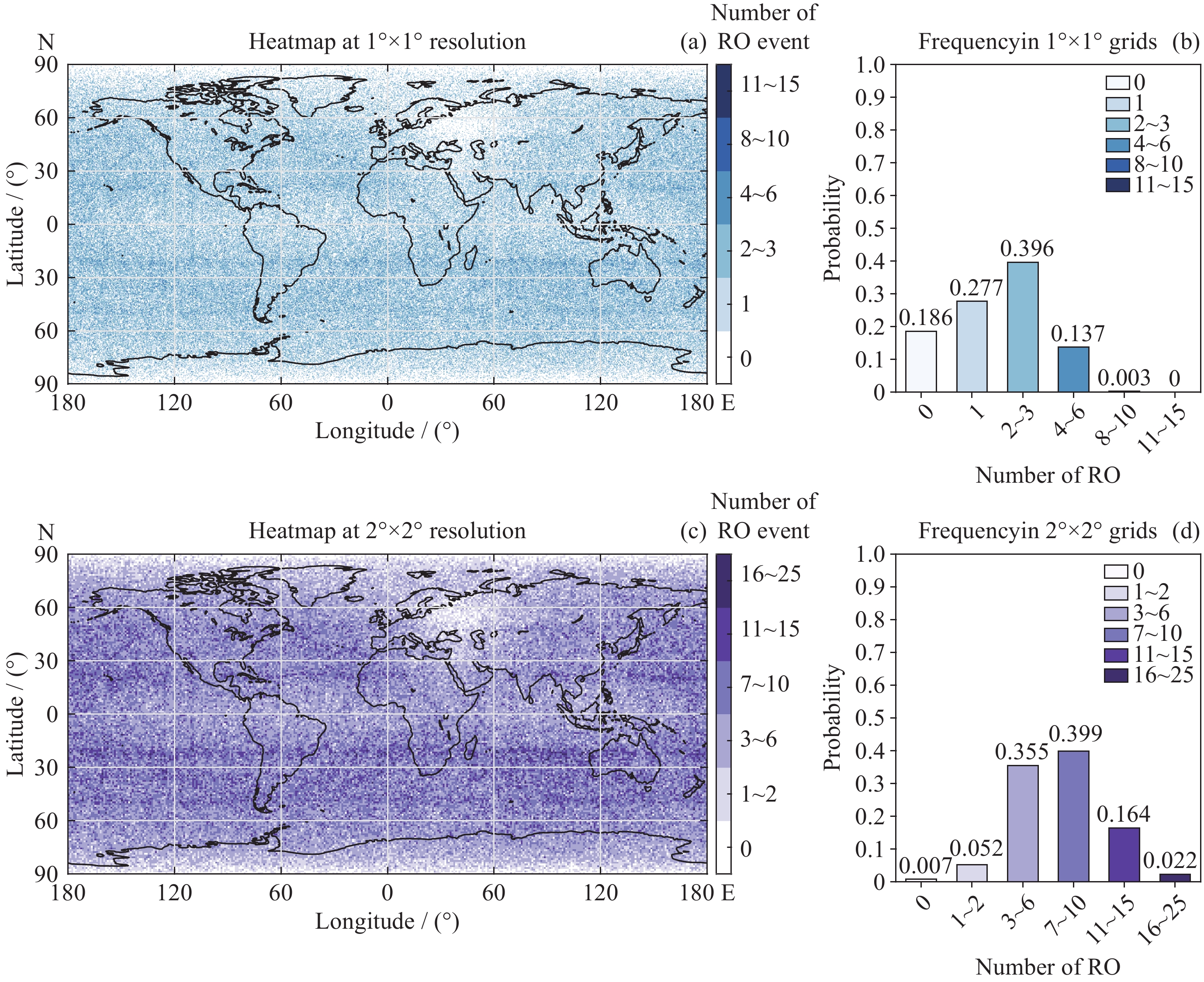
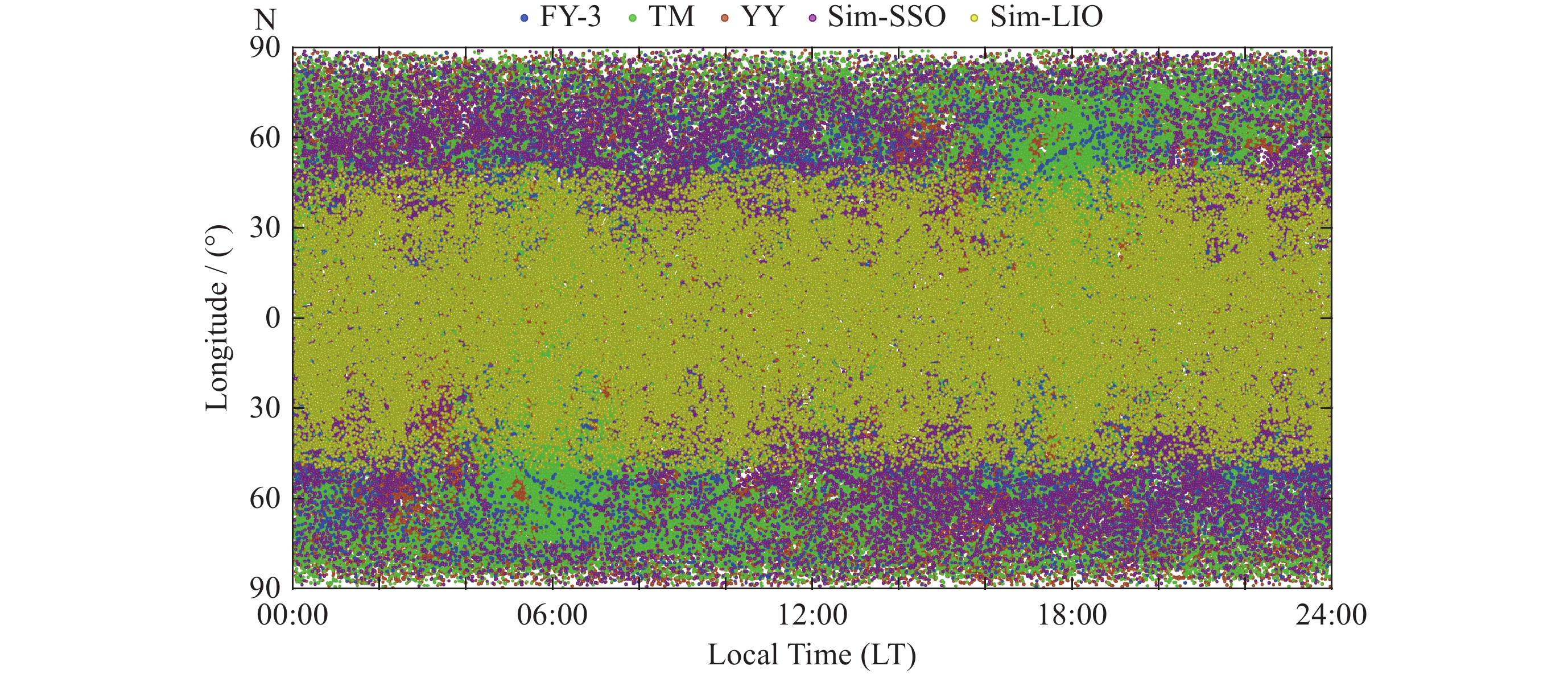
GNSS Radio Occultation (RO) serves as a key technique for constructing a global high-precision atmospheric and ionospheric sounding capability. China’s operational Fengyun-3 (FY-3) RO system produces data of exceptional quality, characterized by high accuracy, stability, and standardization, making it the current accuracy benchmark in RO sounding. However, due to its orbital configuration, the FY-3 system alone still exhibits coverage gaps in equatorial and polar regions. In recent years, the rapid development of commercial constellations such as Tianmu and Yunyao has enabled multi-source RO cooperative observations, offering a promising approach to enhance the spatiotemporal density of RO data. Based on RO measurements from the FY-3, Tianmu, and Yunyao constellations, this study systematically evaluates the spatial distribution characteristics and joint observation benefits of the three systems. Results demonstrate that integrating commercial constellations significantly increases the number of global RO events and improves coverage at low and high latitudes. Local time coverage is also enhanced from segmented intervals to nearly continuous throughout the day. Despite the considerable improvement in observational density, data overconcentration in certain mid-latitude areas and small-scale gaps under high-resolution analysis remain, indicating that orbital configurations and constellation coordination require further optimization. This study provides quantitative references for the future collaborative development of China’s FY-3 and commercial RO constellations.
LU Wenqiang, CHEN Ran, XU Na, MENG Xiangguang, LIAO Mi, LIU Yan, TANG Qi, CHENG Yan, YANG Guanglin, HU Xiuqing, ZHAO Xiangang, SUN Yueqiang. Occultation Distribution and Collaborative Observations of Fengyun Meteorological Satellites and Commercial Satellites (in Chinese). Chinese Journal of Space Science, 2026, 46(3): 692-706. doi: 10.11728/cjss2026.03.2025-0123.