WANG Lianguo,
ZHU Yan,
ZHANG Baoming,
SHEN Weihua,
LI Xue,
XUE Bin,
LI Yuxi,
XU Weiming,
SUN Shuquan,
CAI Zhiguo,
WANG Wei
Abstract:
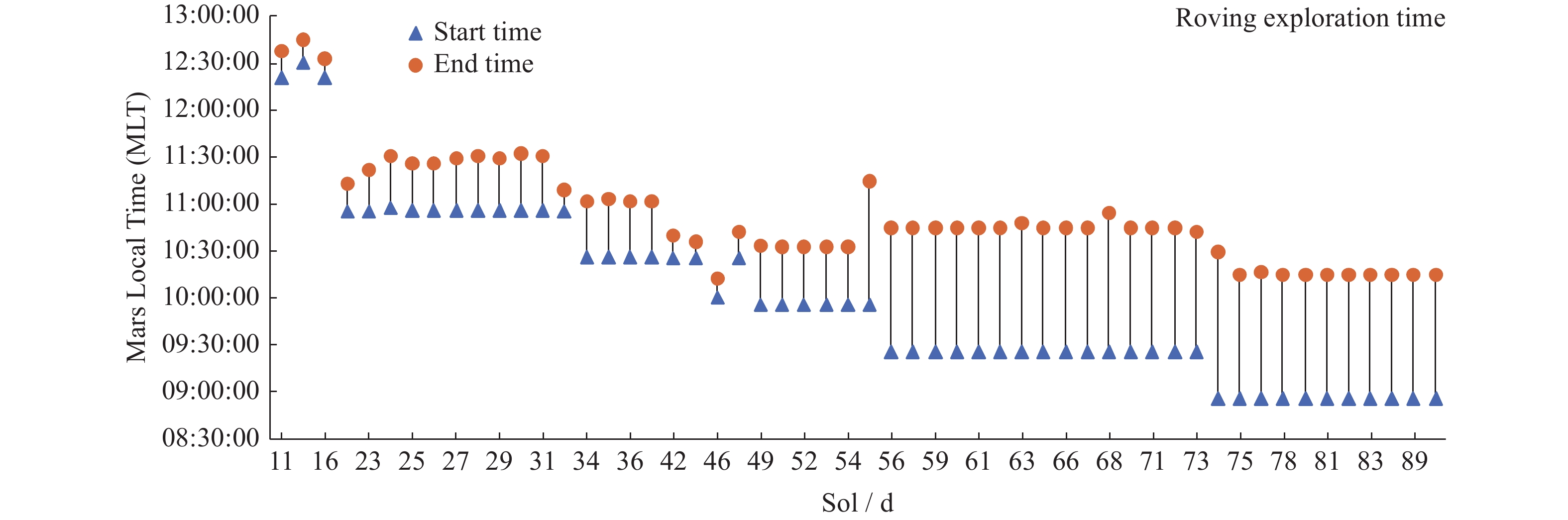
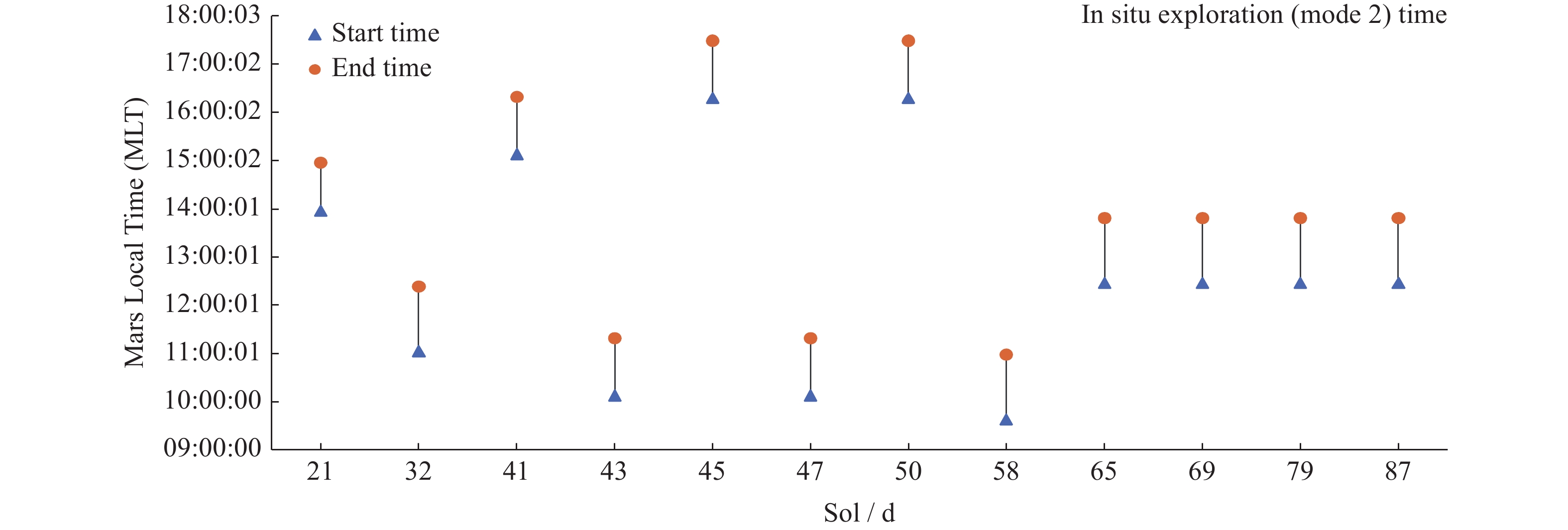
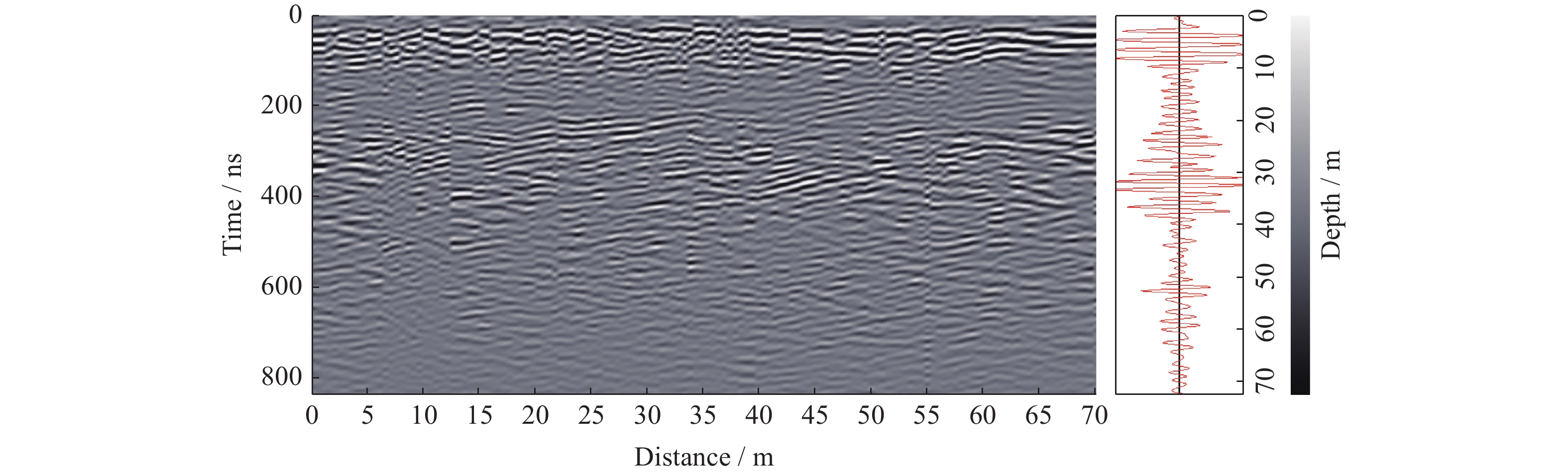
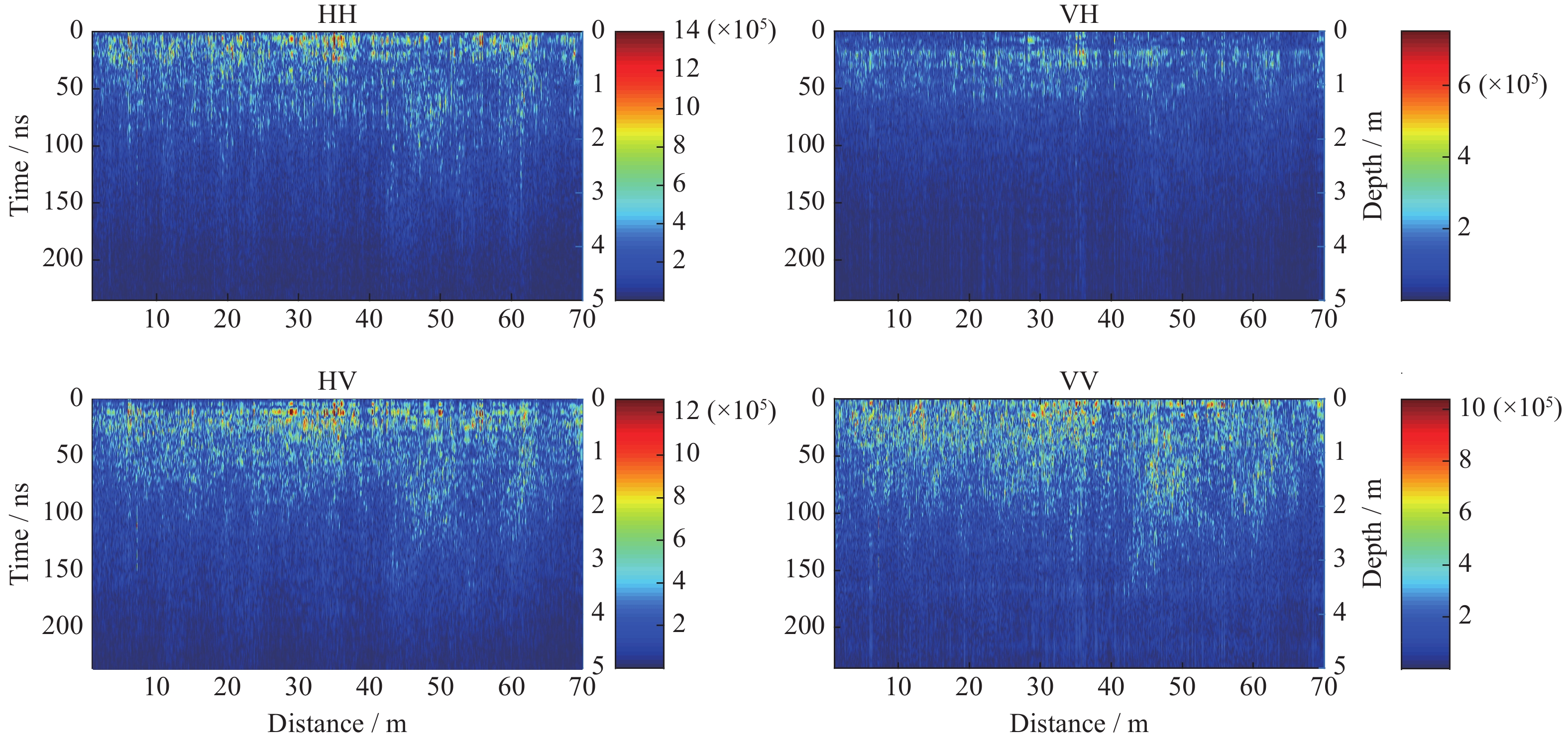
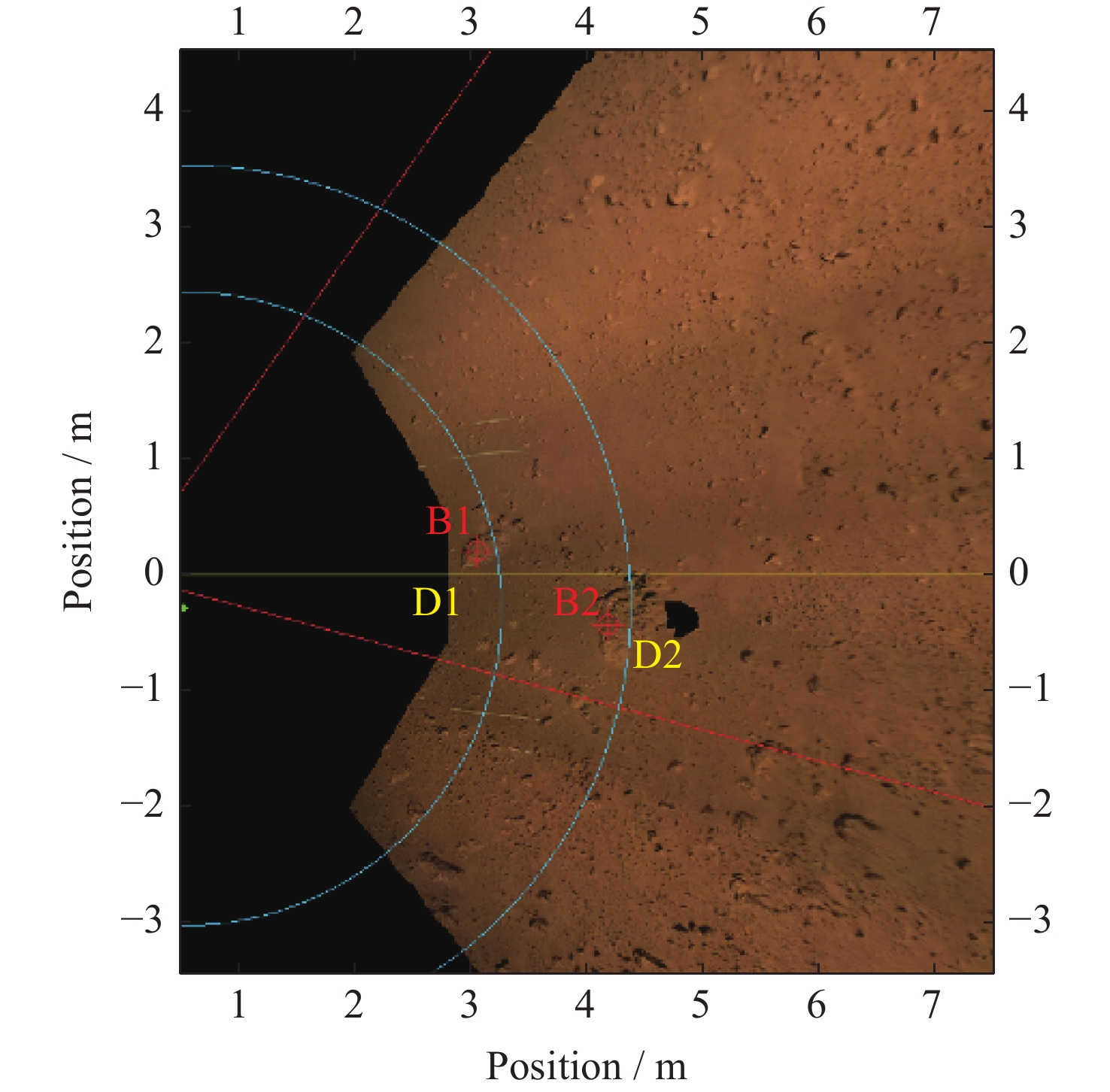
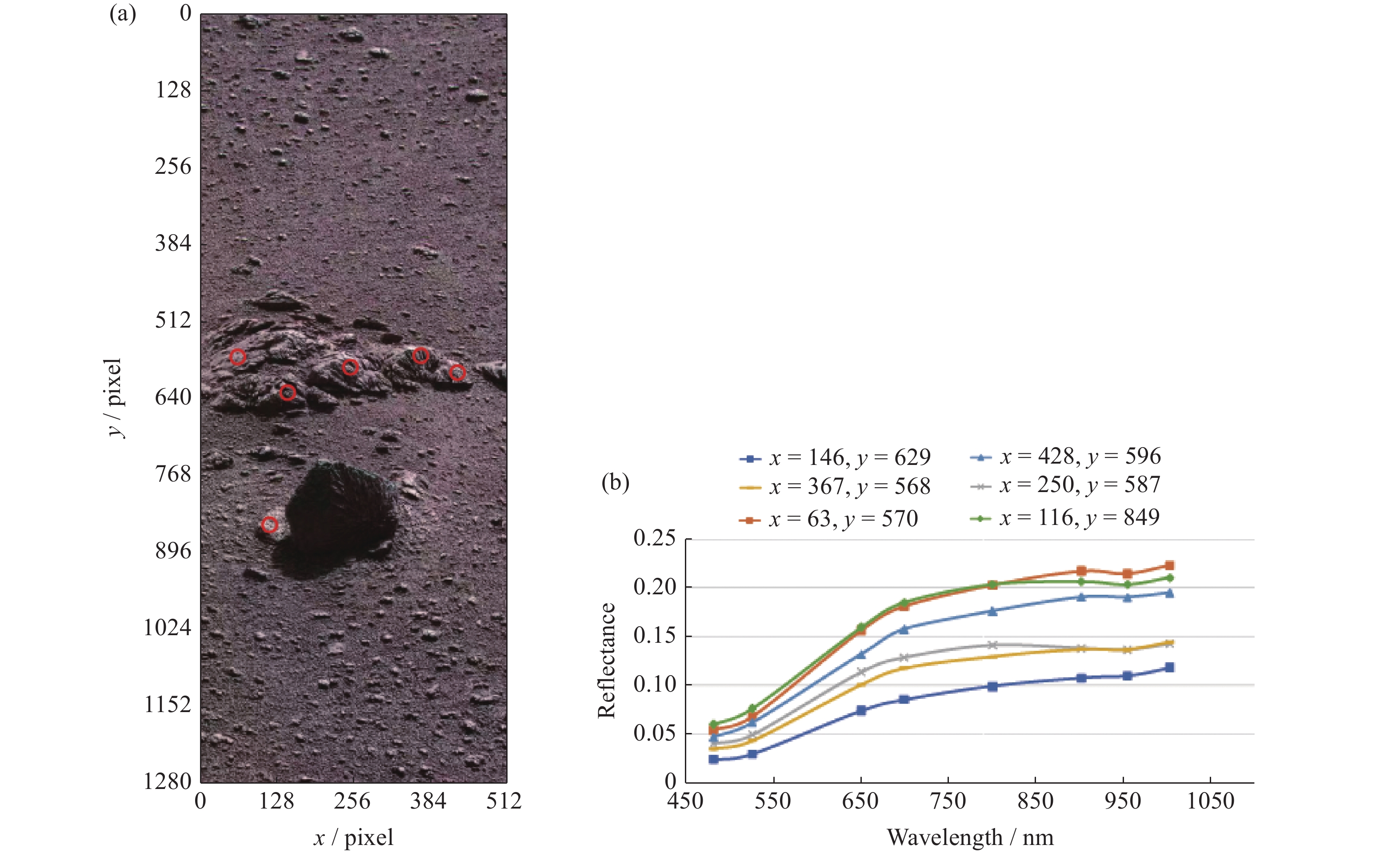
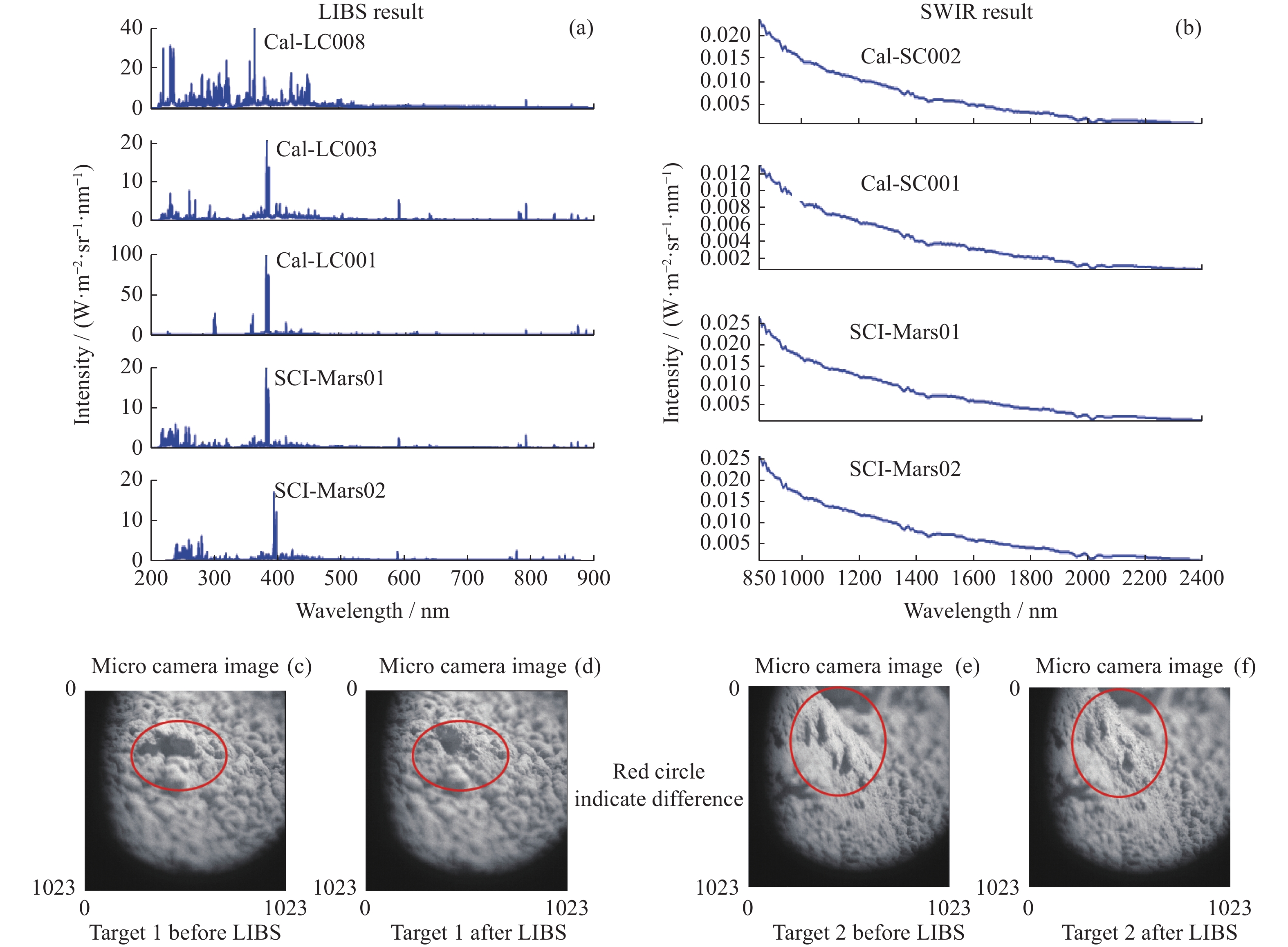
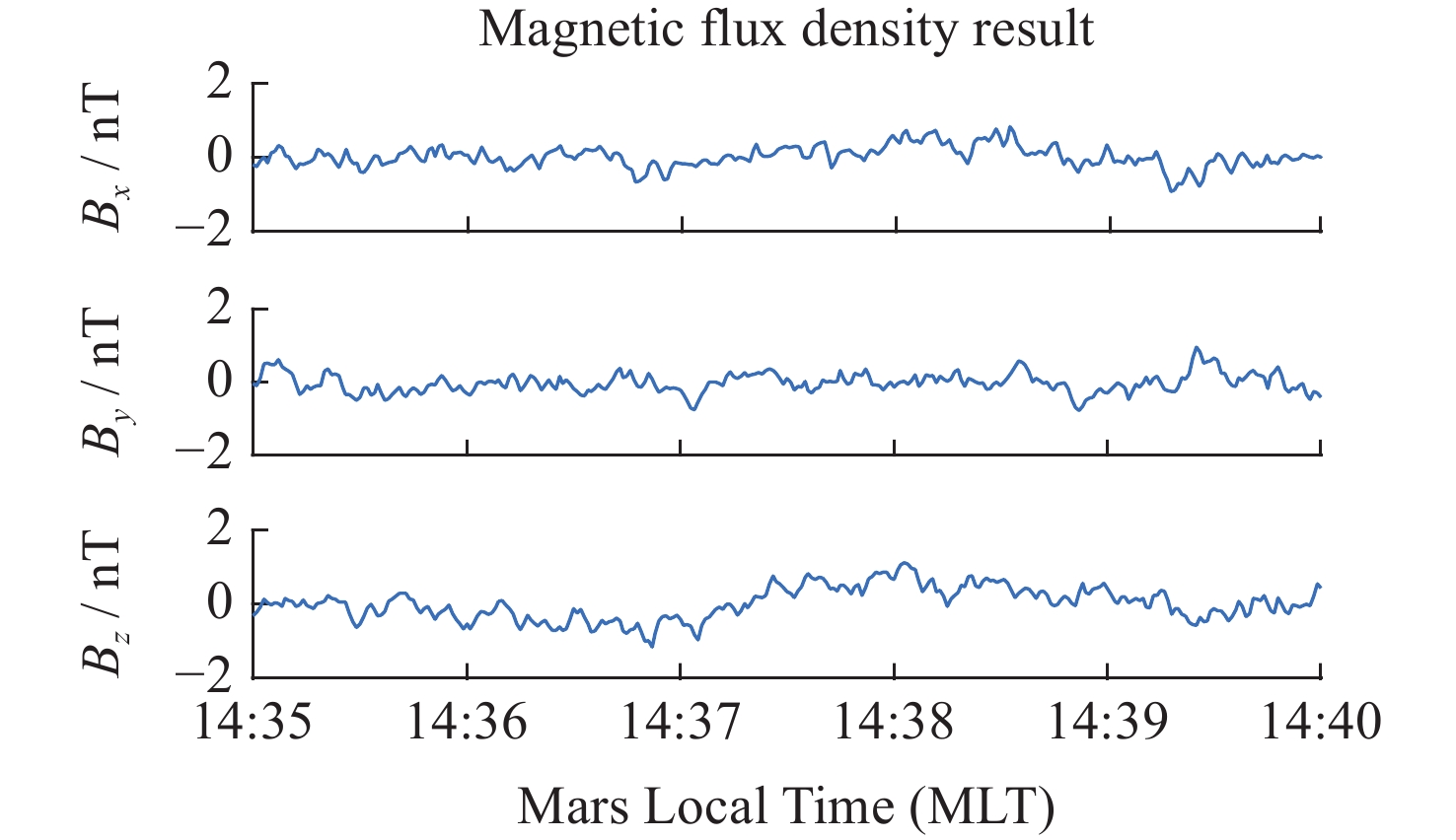
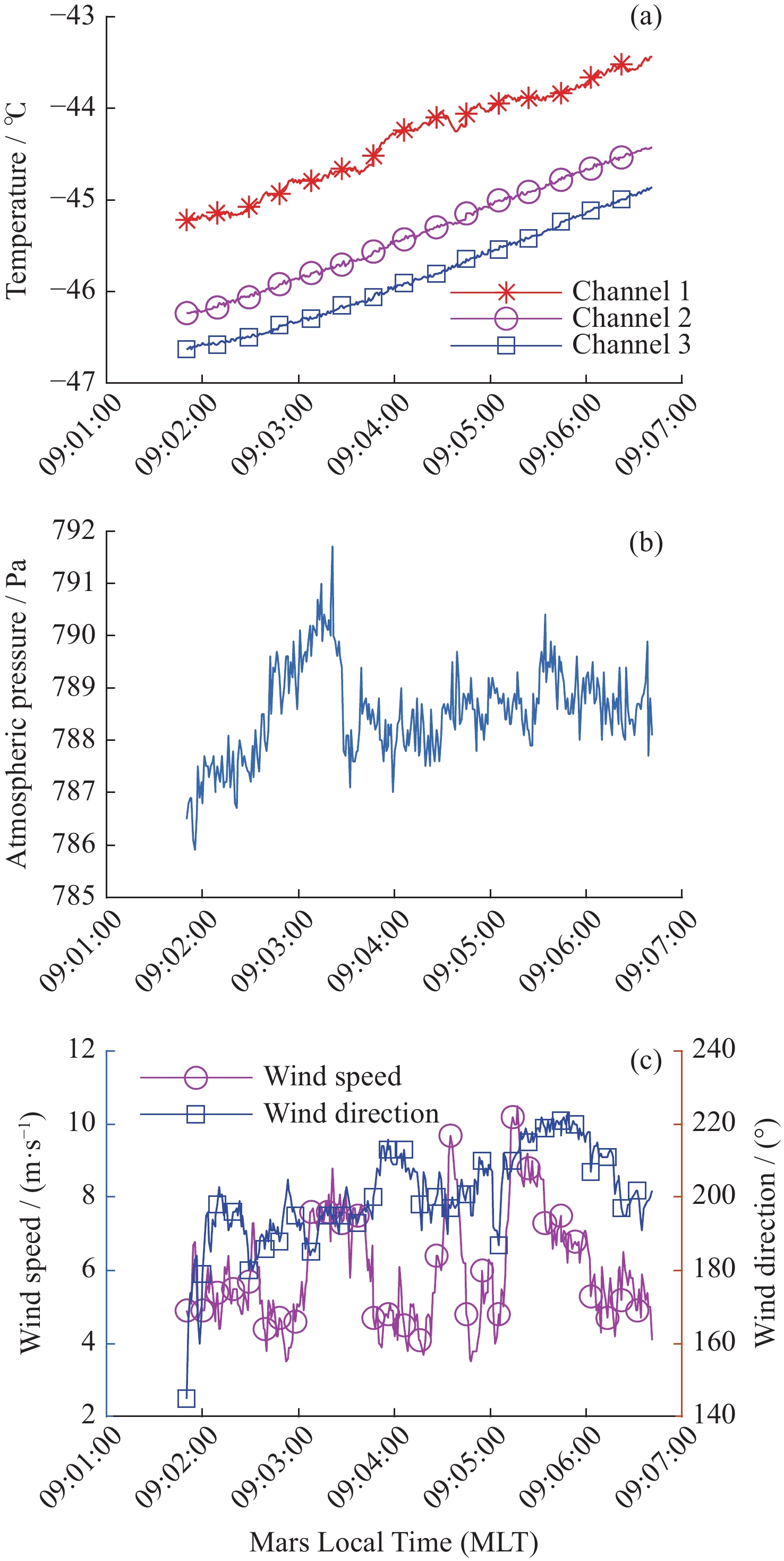
The Zhurong Mars rover conducts high resolution in situ surveys in a critical area of Mars. The scientific payloads mounted on the rover include: Navigation and Terrain Camera (NaTeCam), Multispectral Camera (MSCam), Mars Rover Penetrating Radar (RoPeR), Mars Surface Composition Detector (MarSCoDe), Mars Rover Magnetometer (RoMAG) and Mars Climate Station (MCS). Their scientific exploration tasks include studying topography and geological structure of the Mars roving area; surveying the soil structure (profile) of the Mars roving area and searching for water ice; surveying elements, minerals, and rock types of the Mars roving area; and surveying the atmosphere physical characteristics and the surface environment of the Mars roving area. To obtain as much exploration data as possible with limitations on low communication capability and insufficient energy, it is necessary to improve scientific exploration efficiency of the Zhurong Mars rover. There are two major operating conditions for the payloads, conducting roving exploration when the rover moves and in-situ exploration when the rover stops. Several high-efficiency payload exploration modes are developed for those two conditions. When designing the exploration modes, some aspects need to be considered. The first aspect is myriad of constraints, including rover resources and safety, the Martian environment, telecommunication, and the limitations of the software, hardware, and processes involved. The second, the rover is a shared resource: a variety of science and engineering activities must divide the available energy, time, and transmitted data volume, and must coordinate the use of the rover’s mast and mobility systems. The third point is that each payload has multiple operating modes that must be optimized and combined. The exploration modes, working with autonomous control based on work mode command set, solved the problem of multiple payloads performing collaborative scientific exploration under resource shortage conditions. The Zhurong Mars rover has successfully completed the scheduled exploration mission. All scientific exploration modes have been verified. The results demonstrate that the exploration modes are suitable and effective, and can meet the requirements for conducting safe, autonomous, and efficient scientific exploration.
WANG Lianguo, ZHU Yan, ZHANG Baoming, SHEN Weihua, LI Xue, XUE Bin, LI Yuxi, XU Weiming, SUN Shuquan, CAI Zhiguo, WANG Wei. Design and Verification of Scientific Exploration Mode of Zhurong Mars Rover (in Chinese). Chinese Journal of Space Science, 2023, 43(3): 485-498. doi: 10.11728/cjss2023.03.20220022.